Proximal Policy Optimization
Proximal Policy Optimization AlgorithmsJohn Schulman, F. Wolski, P. Dhariwal, A. Radford and O. Klimov, 2017
摘要——文章提出了一类新的用于强化学习的策略梯度方法,在通过与环境交互采样数据时交替,并使用随机梯度上升优化一个"替代"目标函数。在标准策略梯度方法中每次采样都会进行一次梯度更新,本文提出了一种新的目标函数,使得在多个epochs用minibatch更新成为可能。新方法称为proximal policy optimization (PPO),具有TRPO的部分优点,但更易于实现,更一般化,且有更好的采样复杂度(从经验上来说)。实验表明,PPO优于其它在线策略梯度方法,总体上在采样复杂度、简洁性和延迟时间之间取得了良好的平衡。
1 Introduction
利用神经网络作函数逼近器的强化学习中,主要的方法有deep Q-learning、原始的策略梯度方法和置信域/自然梯度方法。但是,在以下方面还有改进空间:可扩展性(拓展到大的模型和并行实现)、数据高效和鲁棒性(i.e. 无需调超参数即可胜任不同任务)。
本文试图介绍一种算法,该算法在只使用一阶优化的情况下,达到TRPO的数据效率和可靠性能。我们提出了一个新的截断概率比(clipped probability ratios)目标,形成了对策略表现的悲观估计(i.e. 下界)。为了优化策略,我们在从策略中采样数据和对采样数据进行多次优化之间进行交替。
实验对比了不同的替代目标,发现截断概率比目标最好。与其它方法相比,PPO在连续控制任务中表现得比其它方法好。在Atari中,(在样本复杂度上的)性能显著地比A2C好,且与ACER相当,但PPO更简单。
2 Background
2.1 Policy Gradient Methods
策略梯度方法计算策略梯度的估计量,并将其插入到随机梯度上升算法中。虽然提倡使用相同的轨迹对目标函数进行多步优化,但这样做的理由并不充分,而且在经验上往往会导致破坏性的大的策略更新。
2.2 Trust Region Methods
TRPO中,在策略更新大小的约束下最大化目标函数("替代"目标)。在论证TRPO时,实际使用的是惩罚项而不是约束条件。这源于某个替代目标(它计算状态上的最大KL而不是均值)对策略\(\pi\)的性能形成了一个下界。TRPO用硬约束来代替惩罚项是因为很难选择合适的罚系数\(\beta\),固定的\(\beta\)无法胜任不同的问题,甚至在一个简单的问题上都可能效果不好。要想用一阶算法来模拟TRPO的单调改进很难,选择一个固定的罚系数并用SGD来优化"替代"目标函数是不够的,还需要更多修饰。
3 Clipped Surrogate Objective
用\(r_t(\theta)\)表示概率比值\(r_t(\theta) = \frac{\pi_{\theta}(a_t \vert s_t)}{\pi_{\theta_{\text{old}}}(a_t \vert s_t)}\),所以有\(r_t(\theta_{\text{old}}) = 1\)。TRPO最大化的"替代"目标即
\[L^{\text{CPI}}(\theta) = \hat{\mathbb{E}}_t \left[ \frac{\pi_\theta(a_t \mid s_t)}{\pi_{\theta_{\text {old }}}(a_t \mid s_t)} \hat{A}_t \right] = \hat{\mathbb{E}}_t\left[r_t(\theta) \hat{A}_t\right]\]上标CPI表示conservative policy iteration(保守策略迭代)。在没有约束条件的情况下,最大化这个目标函数会带来非常大的策略更新,所以下面我们需要修饰这个目标,惩罚那些让\(r_t(\theta)\)远离1的策略变化。
我们提出了如下目标函数:
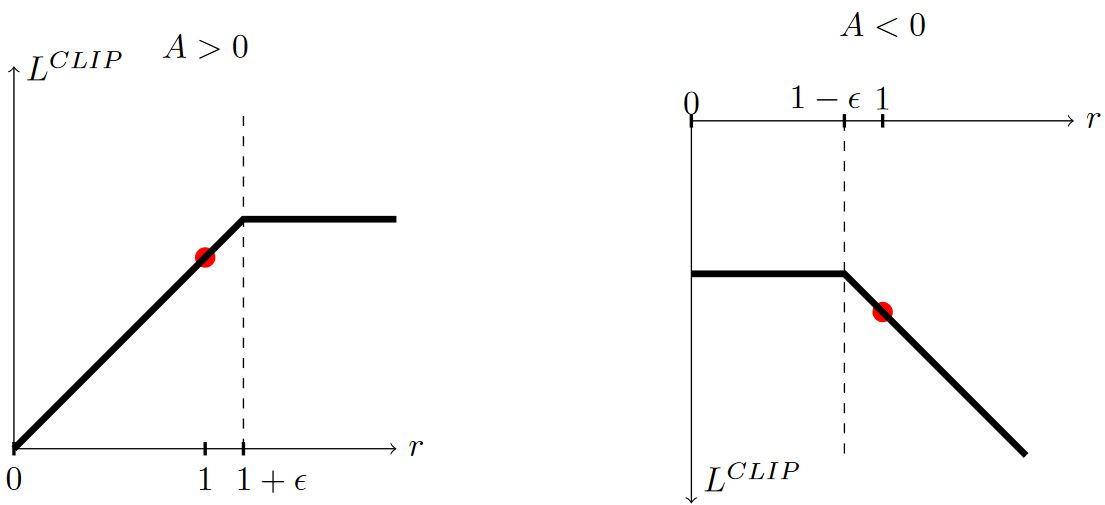
\[\color{green}{ L^{\text{CLIP}}(\theta) = \hat{\mathbb{E}}_t \left[ \min \left( r_t(\theta) \hat{A}_t, \operatorname{clip}(r_t(\theta), 1-\epsilon, 1+\epsilon) \hat{A}_t \right) \right] }\]clip( , , )函数,当第一项小于第二项时,函数值 = 第二项;当第一项大于第三项时,函数值 = 第三项;否则,函数值 = 第一项。
其中\(\epsilon\)是一个超参数,这里\(\epsilon = 0.2\)。\(\min\)函数中第一项即\(L^{\text{CPI}}\)。第二项\(\operatorname{clip}(r_t(\theta), 1-\epsilon, 1+\epsilon) \hat{A}_t\)通过截断概率比值的方式修饰了"替代"目标,移除了将\(r_t\)移出\([1-\epsilon, 1+\epsilon]\)的激励。通过取截断目标和未截断目标中更小的,就可以得到未截断目标的一个下界。通过这个机制,我们可以忽略让目标更好的概率比的变化,但是考虑让目标更差的概率比的变化。注意,在\(\theta_{\text{old}}\)附近\(L^{\text{CLIP}} = L^{\text{CPI}}\)一阶成立,但是\(\theta\)离开\(\theta_{\text{old}}\)后就不成立了。注意,概率比在\(1-\epsilon\)处还是\(1+\epsilon\)处截断取决于adavantage \(\hat{A}_t\)的正负。下图是\(L^{\text{CLIP}}\)中的一项(i.e. 某个时刻\(t\)),整个\(L^{\text{CLIP}}\)是很多这样的项的和。
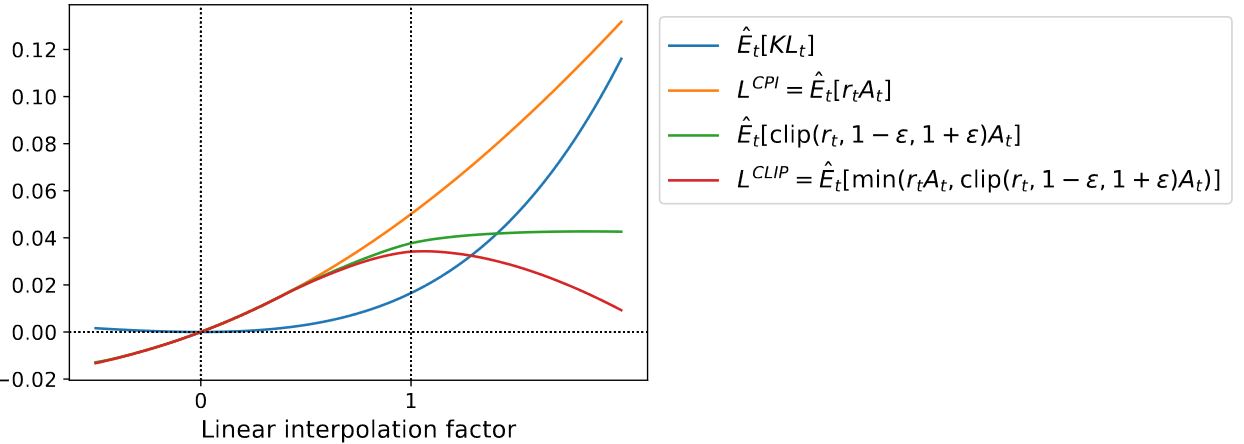
下图是"替代"目标\(L^{\text{CLIP}}\)另一种直觉来源,展示了在一个连续的控制问题上通过近端策略优化(我们将简要介绍的算法)得到的沿策略更新方向插值时,几个目标是如何变化的。
4 Adaptive KL Penalty Coefficient
另一种可以代替或者作为补充的方法,就是对KL散度加惩罚项,并且自适应地调整惩罚项的系数,使得每次策略更新的时候可以达到某个期望的KL散度值\(d_{\text{targ}}\)。在我们的实验中,KL惩罚项的性能不如截断代替目标,但该方法是一个重要的baseline,所以我们没有省略。
该算法的最简单示例,在每次策略更新的时候进行以下操作:
- 用minibatch SGD的几个epoch,优化含KL惩罚的目标
\(L^{K L P E N}(\theta)=\hat{\mathbb{E}}_t\left[\frac{\pi_\theta\left(a_t \mid s_t\right)}{\pi_{\theta_{\text {old }}}\left(a_t \mid s_t\right)} \hat{A}_t-\beta \operatorname{KL}\left[\pi_{\theta_{\text {old }}}\left(\cdot \mid s_t\right), \pi_\theta\left(\cdot \mid s_t\right)\right]\right]\) - 计算\(d=\hat{\mathbb{E}}_t\left[\mathrm{KL}\left[\pi_{\theta_{\text {old }}}\left(\cdot \mid s_t\right), \pi_\theta\left(\cdot \mid s_t\right)\right]\right]\)
— If \(d \lt d_{\text{targ}}/1.5\), \(\beta \leftarrow \beta /2\)
— If \(d \gt d_{\text{targ}} \times 1.5\), \(\beta \leftarrow \beta \times 2\)
更新的\(\beta\)用于下一次策略更新。根据这个方案,策略更新时KL散度很少会与\(d_{\text{targ}}\)相差很大。这种相差很大的情况只会偶尔发生,而且\(\beta\)会迅速调整过来。上面的参数1.5和2都是启发式选择的,但是算法本身对它们并不敏感。\(\beta\)的初值是另一个超参数,但在实际使用是并不重要,因为算法本身会很快调整它。
5 Algorithm
前面章节提到的surrogate losses可以通过在典型的策略梯度实施的基础上小幅变化得到计算和微分。对于那些使用自动微分的实现,一个是简单构造loss \(L^{CLIP}\)或\(L^{KLPEN}\)来代替\(L^{PG}\),一个是在这个目标上执行多步随机梯度上升。
大多是可减小方差的advantage函数估计器的计算技巧都利用了一个学过的state-value函数\(V(s)\)。如果用策略和价值函数参数共享的网络结构,我们就必须用结合了策略surrogate和价值函数误差项的loss function。这个目标函数还可以进一步增广,比如增加一项熵bonus以保证充分探索。将这些项结合起来,得到如下目标:
\[L_t^{CLIP + VF + S}(\theta) = \hat{\mathbb{E}}_t \left[ L_t^{C L I P}(\theta)-c_1 L_t^{V F}(\theta)+c_2 S\left[\pi_\theta\right]\left(s_t\right) \right]\]其中,\(c_1, c_2\)为系数,\(S\)为熵bonus,\(L_t^{V F}\)为方差loss \((V){\theta}(s_t) - V_t^{targ})^2\)。
策略梯度实现的一种类型,非常适合与递归神经网络一起使用,每\(T\)个时间步长运行策略一次(\(T\)远小于episode长度),并用收集到的样本进行一次更新。这类实现需要一个视野不超过\(T\)的advantage估计器,比如
\[\hat{A}_t = -V(s_t) + r_t + \gamma r_{t+1} + \cdots + \gamma^{T-t+1} r_{T-1}+\gamma^{T-t} V(s_T)\]其中,\(t\)表示在给定的T长度的序列片段\([0,T]\)内的时间索引。写出advantage估计的一般形式,该式会在\(\lambda = 1\)的时候退化成上式。
\[\hat{A}_t = \delta_t+(\gamma \lambda) \delta_{t+1}+\cdots+\cdots+(\gamma \lambda)^{T-t+1} \delta_{T-1}, \text{ where } \delta_t=r_t+\gamma V\left(s_{t+1}\right)-V\left(s_t\right)\]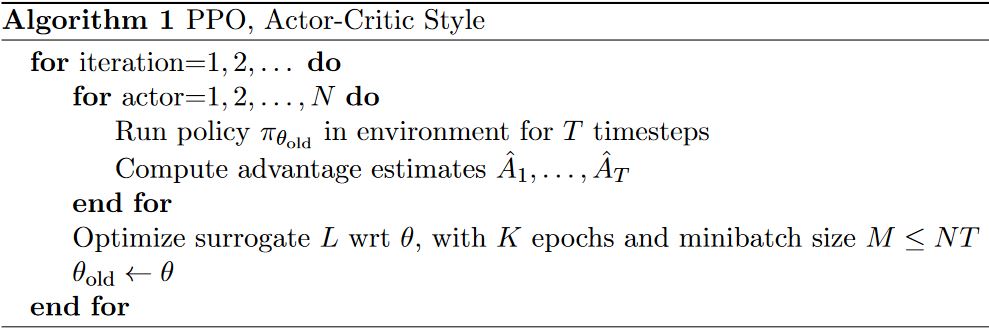
采用定长轨迹片段的PPO算法如上所示。每次迭代,\(N\)个(并行)中的每个actor收集\(T\)时间步长的数据。然后,基于这\(NT\)个时间步长的数据构造surrogate loss,并用minibatch SGD对\(K\)个epochs进行优化。
