Plicy Optimization Ⅱ: SOTA
- Policy Gradient→Natural Policy Gradient/TRPO→ACKTR→PPO
TRPO: Trust region policy optimization. Schulman, L., Moritz, Jordan, Abbeel. 2015
ACKTR: Scalable trust-region method for deep reinforcement learning using Kronecker-factored approximation. Y. Wu, E. Mansimov, S. Liao, R. Grosse, and J. Ba. 2017
PPO: Proximal policy optimization algorithms. Schulman, Wolski, Dhariwal, Radford, Klimov. 2017 - Q-learning→DDPG→TD3→SAC
DDPG: Deterministic Policy Gradient Algorithms, Silver et al. 2014
TD3: Addressing Function Approximation Error in Actor-Critic Methods, Fujimoto et al. 2018
SAC: Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor, Haarnoja et al. 2018
这章的内容非常有挑战性,建议先阅读论文。
6.0 Review
6.0.1 Value-based VS Policy-based
- 在基于价值的RL确定性策略是直接对价值函数作\(a_t = \operatorname{argmax}_a Q(s_t,a)\)贪心运算得到的。
- 在策略优化中,我们有来自\(\pi_{\theta}(a \vert s)\)随机的策略输出,其中\(\theta\)是要优化的策略参数。
策略目标函数为\(J(\theta) = \mathbb{E}_{\tau \sim \pi_{\theta}} [R(\tau)]\),
策略梯度(REINFORCE)为\(\nabla_{\theta} J(\theta) =\mathbb{E}_{\pi_{\theta}}\left[G_{t} \nabla_{\theta} \log \pi_{\theta}(s, a)\right] \approx \frac{1}{N} \sum_{i=1}^{N} \sum_{t=0}^{T-1} G_{t}^{i} \nabla_{\theta} \log \pi_{\theta}\left(s_{i}, a_{i}\right)\)。
6.0.2 Advantage Actor-Critic
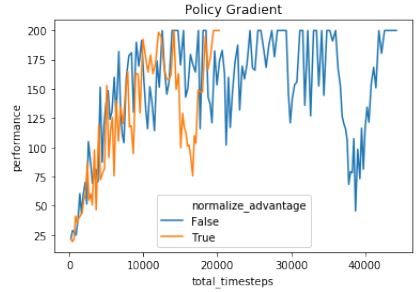
引入baseline来减小AC的方差
Advantage function将\(Q\)与baseline \(V\)结合:
\[A^{\pi}(s,a) = Q^{\pi}(s,a) - V^{\pi}(s)\]那么策略梯度变为:
\[\nabla_{\theta}J(\theta) = \mathbb{E}_{\pi_{\theta}} [\nabla_{\theta} \log \pi_{\theta}(s,a) A^{\pi_{\theta}}(s,a)]\]两个函数逼近器包含两组参数向量,利用TD learning或MC来更新这两组参数
\[\begin{aligned} V_{\mathbf{v}}(s) & \approx V^{\pi}(s) \\ Q_{\mathbf{w}}(s,a) & \approx Q^{\pi}(s,a) \end{aligned}\]对于真价值函数\(V^{\pi_{\theta}}(s)\),其TD error \(\delta^{\pi_{\theta}} = r(s,a) + \gamma V^{\pi_{\theta}}(s') - V^{\pi_{\theta}}(s)\),是优势函数的估计值。
\[\begin{aligned} \mathbb{E}_{\pi_{\theta}}\left[\delta^{\pi_{\theta}} \mid s, a\right] &= \mathbb{E}_{\pi_{\theta}}\left[r+\gamma V^{\pi_{\theta}}\left(s^{\prime}\right) \mid s, a\right]-V^{\pi_{\theta}}(s) \\ &= Q^{\pi_{\theta}}(s, a)-V^{\pi_{\theta}}(s) \\ &= A^{\pi_{\theta}}(s, a) \end{aligned}\]所以,我们可以用TD error来计算策略梯度
\[\nabla_{\theta}J(\theta) = \mathbb{E}_{\pi_{\theta}} [\nabla_{\theta} \log \pi_{\theta}(s,a) \delta^{\pi_{\theta}}]\]这样,只要一组由TD估计的critic参数\(\color{red}{\kappa}\)就可以了
\[\delta_{\mathbf{v}} = r + \gamma V_{\kappa}(s') - V_{\kappa}(s)\]6.0.3 Different time-scales
Crtic at different time-scales
Critic可以从以下多个目标来估计线性价值函数\(V_{\kappa}(s) = \psi(s)^T \kappa\):
对于MC,其更新为\(\Delta \kappa = \alpha(\color{green}{G_t} \color{black}{-} V_{\kappa}(s)) \psi(s)\)
对于TD(0),其更新为\(\Delta \kappa = \alpha(\color{green}{r + \gamma V_{\kappa}(s')} \color{black}{-} V_{\kappa}(s)) \psi(s)\)
对于k-step return,其更新为\(\Delta \kappa = \alpha(\color{green}{\sum_{i=0}^k \gamma^i r_{t+i} + \gamma^k V_{\kappa}(s_{t+k})} \color{black}{-} V_{\kappa}(s)) \psi(s)\)
Actors at different time-scales
策略梯度\(\nabla_{\theta}J(\theta) = \mathbb{E}_{\pi_{\theta}} [\nabla_{\theta} \log \pi_{\theta}(s,a) A^{\pi_{\theta}}(s,a)]\)也可以在许多时间尺度上进行估计:
Monte-Carlo Actor-Critic策略梯度用整个return的误差来估计,\(\nabla_{\theta}J(\theta) = \alpha(G_t - V_{\kappa}(s_t)) \nabla_{\theta} \log \pi_{\theta}(s_t,a_t)\)。
TD Difference Actor-Critic策略梯度用TD error来估计,\(\nabla_{\theta}J(\theta) = \alpha \big(r + \gamma V_{\kappa}(s_{t+1}) - V_{\kappa}(s_t) \big) \nabla_{\theta} \log \pi_{\theta}(s_t,a_t)\)。
k-step return Actor-Critic策略梯度用k-step return的误差来估计,\(\nabla_{\theta}J(\theta) = \alpha \big( \sum_{i=0}^k \gamma^i r_{t+i} + \gamma^k V_{\kappa}(s_{t+k}) - V_{\kappa}(s_t) \big) \nabla_{\theta} \log \pi_{\theta}(s_t,a_t)\)。
6.0.5 Summary of PG Algorithms
- 策略梯度有很多不同形式 \(\begin{aligned} \nabla_{\theta} J(\theta) &=\mathbb{E}_{\pi_{\theta}}\left[\nabla_{\theta} \log \pi_{\theta}(s, a) G_{t}\right] \text{ ——REINFORCE} \\ &=\mathbb{E}_{\pi_{\theta}}\left[\nabla_{\theta} \log \pi_{\theta}(s, a) Q^{\mathrm{w}}(s, a)\right] \text{ ——Q Actor-Critic} \\ &=\mathbb{E}_{\pi_{\theta}}\left[\nabla_{\theta} \log \pi_{\theta}(s, a) A^{\mathrm{w}}(s, a)\right] \text{ ——Advantage Actor-Critic} \\ &=\mathbb{E}_{\pi_{\theta}}\left[\nabla_{\theta} \log \pi_{\theta}(s, a) \delta\right] \text{ ——TD Actor-Critic} \end{aligned}\)
- Critic用策略评估(e.g. MC或TD learning)来估计\(Q^{\pi}(s,a)\),\(A^{\pi}(s,a)\)或\(V^{\pi}(s)\)。
6.1 Trust Region Policy Optimization
Problems with PG
1. 采样效率低,因为PG是在线学习,\(\nabla_{\theta} J(\theta) = \mathbb{E}_{a \sim \pi_{\theta}} [\nabla_{\theta} \log{ \pi_{\theta}(s,a) r(s,a) }]\)
2. 策略更新过大或步长不当会破坏训练
这点和监督学习不一样,因为在监督学习中学习和数据是独立的。
在RL中,步长过大→坏的策略→坏的数据收集
可能无法从坏的策略中恢复,这会破坏整体的性能
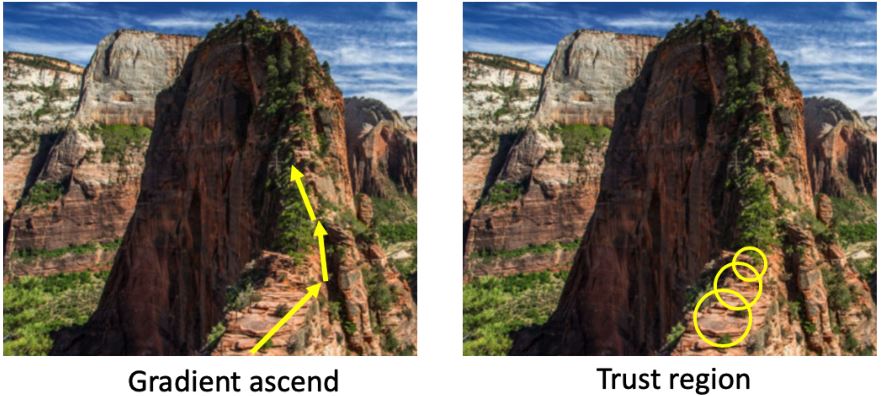
如何使训练更稳定?
— Trust region和natural policy gradient(二阶的优化方式)
如何进行离策略的策略优化?
— 在TRPO中用的重要性采样
6.1.0 Preliminaries
1. Natural policy gradient
策略梯度是欧几里得度量参数空间中最陡的上升:
\[d^{*} = \nabla_{\theta} J(\theta)=\lim _{\epsilon \rightarrow 0} \frac{1}{\epsilon} \arg \max J(\theta+d), \text { s.t. }\|d\| \leq \epsilon\]它的缺点是对策略函数的参数化很敏感。
以KL-divergence(相对熵)为约束的distribution space(策略输出)中的最陡上升:
\[d^{*} = \arg \max J(\theta+d), \text { s.t. } KL(\pi_{\theta} \| \pi_{\theta+d})=c\]将KL散度固定为常数\(c\),可以确保我们以恒定速度沿着分布空间移动,而不管曲率如何(因此对模型参数化具有鲁棒性,因为我们只关心由参数引起的分布)。
KL-divergence as metric for two distributions
KL散度用于度量两个分布的"近似程度":
\[\color{green}{ KL(\pi_{\theta} \| \pi_{\theta'}) = \mathbb{E}_{\pi_{\theta}}[\log \pi_{\theta}] - \mathbb{E}_{\pi_{\theta}}[\log \pi_{\theta'}] }\]尽管KL散度是非对称的,因此不是真正的度量,但这不影响我们使用它。这是因为当\(d\)趋向于0时,KL散度是渐进对称的。所以,在局部邻域内KL散度是近似对称的。
我们可以证明KL散度的二阶Taylor展开为
\[KL(\pi_{\theta} \| \pi_{\theta+d}) \approx \frac{1}{2} d^T \mathbf{F} d\]其中\(\mathbf{F}\)是KL散度的二阶导数\(\mathbb{E}_{\pi_{\theta}} [\nabla \log \pi_{\theta} \nabla \log \pi_{\theta}^T]\),即Fisher Information Matrix(费舍尔信息矩阵)。
把以KL-divergence(相对熵)为约束的distribution space(策略输出)中的最陡上升\(d^{*} = \arg \max J(\theta+d), \text { s.t. } KL(\pi_{\theta} \| \pi_{\theta+d})=c\)写成Lagrangian形式,\(J(\theta+d)\)由其一阶泰勒展开近似,约束KL散度由其二阶泰勒展开近似,得到
\[\begin{aligned} d^{*} &= \underset{d}{\arg \max } J(\theta+d)-\lambda\left(K L\left(\pi_{\theta} \| \pi_{\theta+d}\right)-c\right) \\ & \approx \underset{d}{\arg \max } J(\theta)+\nabla_{\theta} J(\theta)^{T} d-\frac{1}{2} \lambda d^{T} F d+\lambda c \end{aligned}\]为了求最大化,我们令其关于\(d\)的导数为零,得到natural Policy gradient \(d = \frac{1}{\lambda} \mathbf{F}^{-1} \nabla_{\theta} J(\theta)\)。
自然策略梯度是二阶优化,更加准确而且与模型如何参数化无关(model invariant)。
\[\theta_{t+1} = \theta_t + \alpha \mathbf{F}^{-1} \nabla_{\theta} J(\theta)\]其中,\(\mathbf{F} = \mathbb{E}_{\pi_{\theta}(s,a)} [\nabla \log \pi_{\theta}(s,a) \nabla \log \pi_{\theta}(s,a)^T]\)为Fisher信息矩阵,即KL散度的二阶微分。\(\mathbf{F}\)度量了策略(分布)关于模型参数\(\theta\)的曲率。
无论模型如何参数化,自然策略梯度都会产生相同的策略变化。
关于自然梯度:A Natural Policy Gradient, 2001、techblog: Natural Gradient Descent、知乎:自然策略梯度。
2. PG with IS
我们可以利用重要性采样将策略梯度变成离策略学习。重要性采样(important sampling, IS):计算\(f(x)\)的期望值,其中\(x\)具有数据分布\(p\)。我们可以从另一个分布\(q\)中采样数据,使用\(p\)和\(q\)之间的概率比重新校准结果。(IS代码示例)
\[\mathbb{E}_{x \sim p} [f(x)] = \int p(x)f(x)dx = \int q(x) \frac{p(x)}{q(x)} dx = \mathbb{E}_{x \sim q} \left[ \frac{p(x)}{q(x)} f(x) \right]\]对策略目标进行重要性采样
\[J(\theta) = \mathbb{E}_{\color{green}{a \sim \pi_{\theta}}} \color{black}{[r(s,a)]} = \mathbb{E}_{\color{green}{a \sim \hat{\pi}}} \color{black}{\left[ \frac{\pi_{\theta}(s,a)}{\hat{\pi}(s,a)} r(s,a) \right]}\]6.1.1 Increasing the robustness with TR
行为策略可以直接是旧策略,因此我们可以有一个替代目标函数
\[\theta = \underset{\theta}{\arg \max } J_{\theta_{\text {old }}}(\theta) = \underset{\theta}{\arg \max } \mathbb{E}_{t}\left[\frac{\pi_{\theta}\left(a_{t} \mid s_{t}\right)}{\pi_{\theta_{\text {old }}}\left(a_{t} \mid s_{t}\right)} R_{t}\right]\]当\(\pi_{\theta} / \pi_{\theta_{\text{old}}}\)太大时,估计值可能会过大。解决方案:限制后续策略之间的差异。比如,用KL散度来测量两个策略之间的距离
\[KL(\pi_{\theta_{\text{old}}} \| \pi_{\theta}) = - \sum_a \pi_{\theta_{\text{old}}}(a \vert s) \log \frac{\pi_{\theta}(a \vert s)}{\pi_{\theta_{\text{old}}}(a \vert s)}\]因此,包含置信区间的目标变成最大化
\[\begin{aligned} & J_{\theta_{\text {old }}}(\theta) = \mathbb{E}_t \left[\frac{\pi_\theta\left(a_t \mid s_t\right)}{\pi_{\theta_{\text {old }}}\left(a_t \mid s_t\right)} R_t\right] \\ & \text {s.t. } KL \big(\pi_{\theta_{\text {old }}} \left(. \mid s_t\right) \| \pi_\theta \left(. \mid s_t\right)\big) \leq \delta \end{aligned}\]在置信区间中,我们将参数搜索限制在一个由\(\delta\)控制的区域内。这是TRPO和PPO背后的思想。
6.1.2 Trust region optimization
将用Taylor展开到二阶,经推导可得
\[\begin{aligned} J_{\theta_t}(\theta) & \approx g^T (\theta-\theta_t) \\ K L\left(\theta_t \| \theta\right) & \approx \frac{1}{2} (\theta-\theta_t)^T H (\theta-\theta_t) \end{aligned}\]其中,\(g = \nabla_{\theta} J_{\theta_t}(\theta)\),\(H = \nabla_{\theta}^2 KL(\theta_t \| \theta)\),\(\theta_t\)即\(\theta_{\text{old}}\)。
那么目标变为:
\[\begin{aligned} & \theta_{t+1} = \operatorname{arg max}_{\theta} g^T(\theta-\theta_t) \\ & \text{s.t. } \frac{1}{2} (\theta-\theta_t)^T H (\theta-\theta_t) \le \delta \end{aligned}\]这是一个二次方程,可以求解析解:
\[\theta_{t+1} = \theta_t + \sqrt{\frac{2 \delta}{g^T H^{-1} g}} H^{-1} g\]TRPO的参数更新中没有设置步长,这里我们认为步长是跟δ的大小相关(即上式中的根号项)。所以在TRPO中只需要给出我们希望新策略和旧策略间相距多少即可。
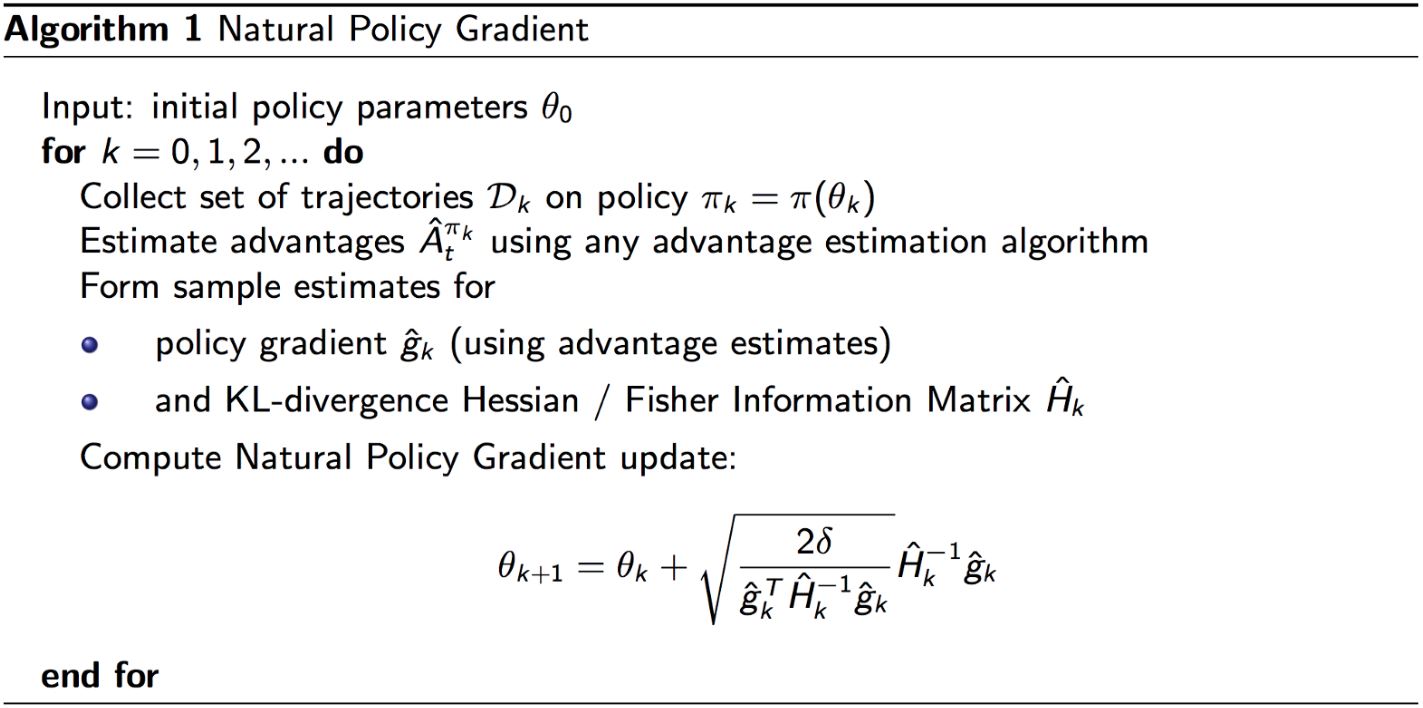
6.1.3 Natural policy gradient
自然梯度是相对于Fisher信息的最陡上升方向,\(H\)即为Fisher信息矩阵(FIM),其计算如下
\[H =\nabla_\theta^2 K L\left(\pi_{\theta_t} \| \pi_\theta\right)=E_{a, s \sim \pi_{\theta_t}}\left[\nabla_\theta \log \pi_\theta(a, s) \nabla_\theta \log \pi_\theta(a, s)^T\right]\]学习率 (\(\delta\)) 可以被认为是选择了一个根据策略变化标准化的步长。这是有益的,因为这意味着任何参数更新都不会显著改变策略网络的输出。
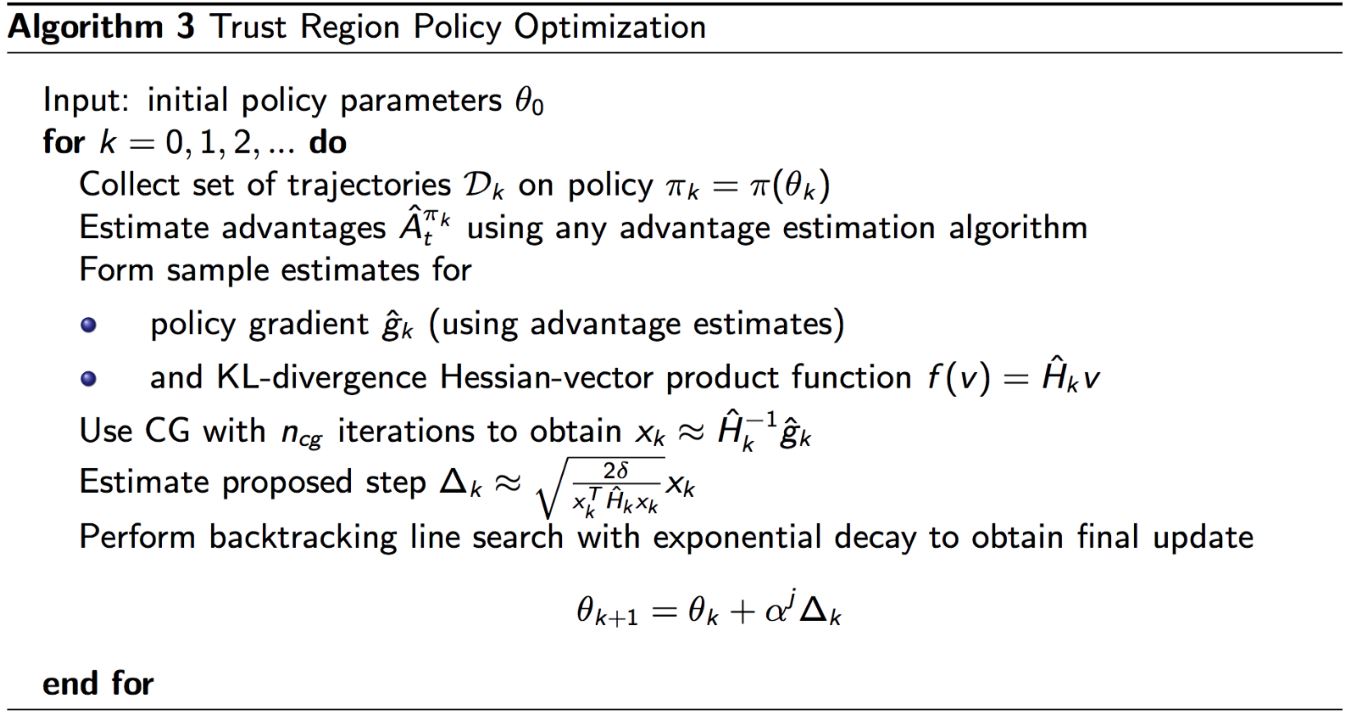
6.1.4 TRPO
FIM及其转置计算成本很高,所以TRPO通过解线性方程\(H \mathbf{x} = g\)来估计\(\mathbf{x} = H^{-1} g\)。
考虑二次方程的优化。解\(\mathbf{Ax = b}\)等价于\(\mathbf{x} = \operatorname{arg max}_{\mathbf{x}} \frac{1}{2} \mathbf{x}^T \mathbf{Ax} - \mathbf{b}^T \mathbf{x}\),由于\(f'(\mathbf{x}) = \mathbf{Ax - b} = 0\),所以我们可以把二次方程优化为
\[\min_{\mathbf{x}} \frac{1}{2} \mathbf{x}^T H \mathbf{x} - g^T \mathbf{x}\]用共轭梯度法求解。它与梯度上升非常相似,但可以在较少的迭代中完成。
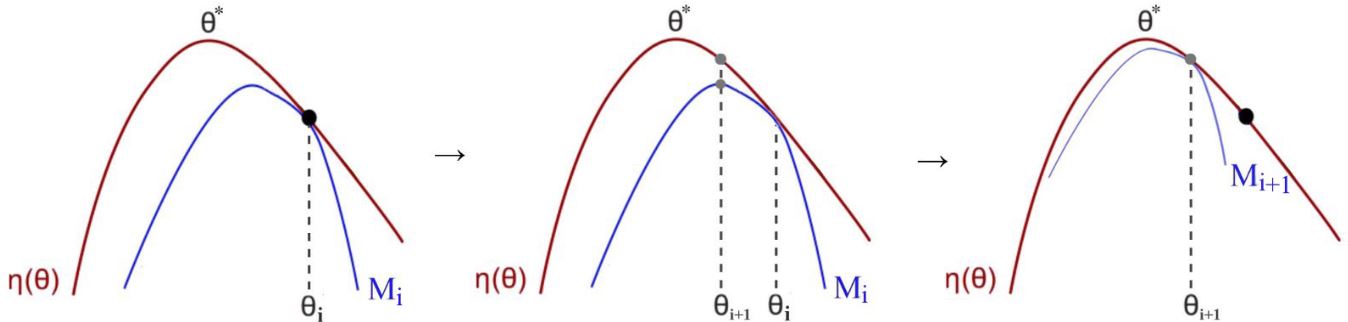
TRPO论文的附录A提供了一个2页证明,证明此方法可保证单调改进,即每次TRPO迭代中的策略更新都会创建更好的策略
\[J(\pi_{t+1}) - J(\pi_t) \ge M_t(\pi_{t+1}) - M(\pi_t) \qquad \text{where } M_t(\pi) = L_{\pi_t}(\pi)-\alpha D_{KL}(\pi_t, \pi)\]因此,通过在每次迭代时最大化\(M_t\),可以保证真实目标\(J\)是不会减小的。它是一种Minorize-Maximization (MM) 算法,是一类包含期望最大化的方法。MM算法通过最大化代理函数(下面的蓝线)来迭代地实现这一点,该代理函数近似于本地的预期回报。
Result & Demo of TRPO
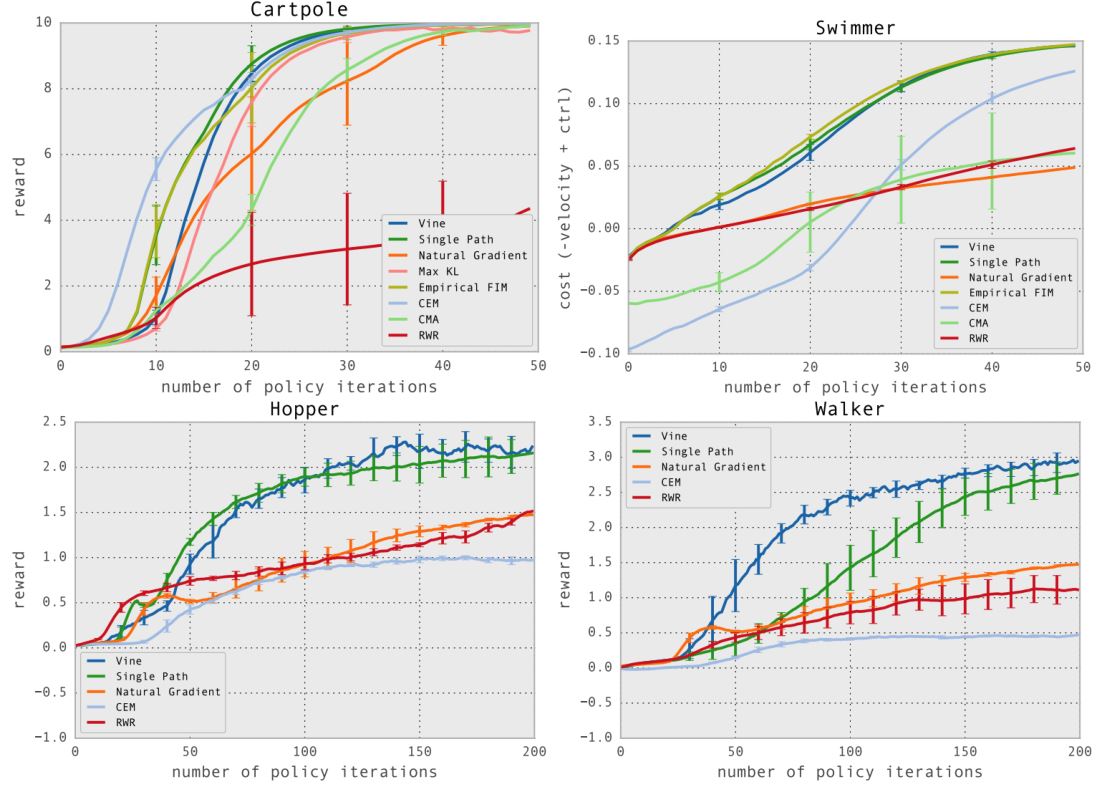
演示视频位于(https://www.youtube.com/watch?v=KJ15iGGJFvQ)。
6.1.5 Limitations of TRPO
- TRPO的可扩展性问题
每次为当前策略模型计算\(H\)代价很高
需要大量rollout才能逼近\(H\), \(H=E_{s, a \sim \pi_{\theta_t}}\left[\left(\nabla_\theta \log \pi_\theta(s, a)\right)^T\left(\nabla_\theta \log \pi_\theta(s, a)\right)\right]\)
共轭梯度(Conjugate Gradient, CG)使实现更加复杂 - TRPO在有些任务的表现上不如DQN
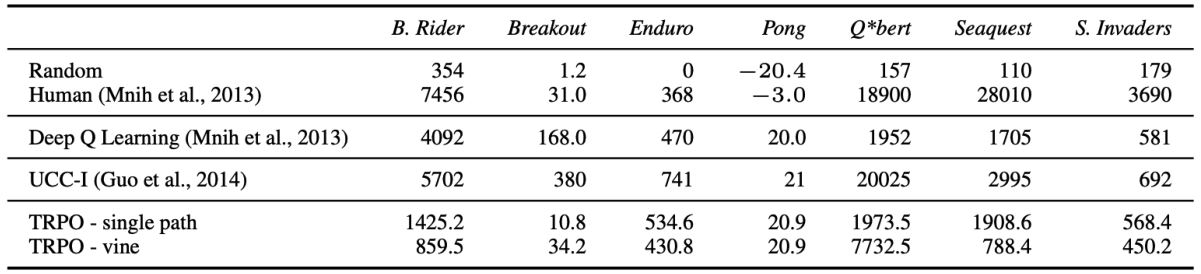
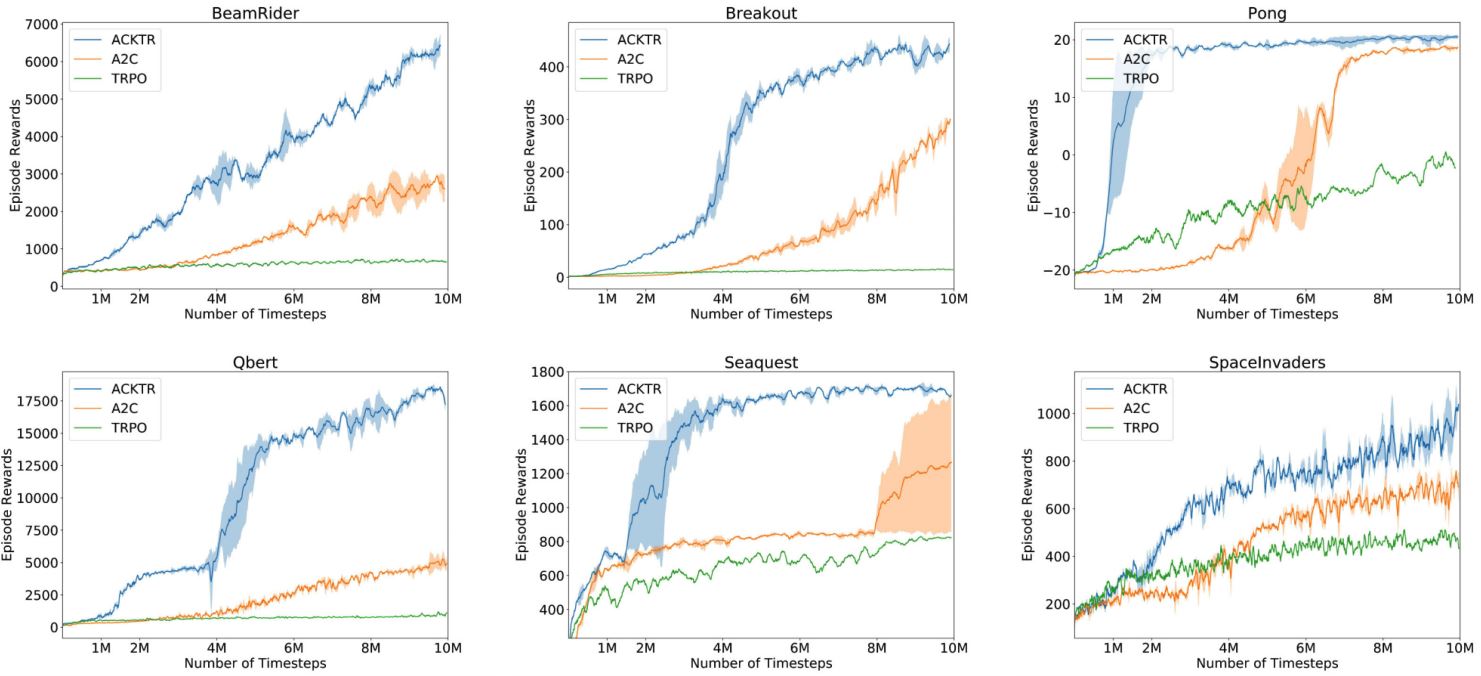
6.2 ACKTR: Calculate Natural Gradient with K-FAC
ACKTR用Kronecker因子近似曲率(K-FAC)简化了Fisher信息矩阵(FIM)的求逆过程,加速了优化。
\[\mathbf{F} = \mathbb{E}_{x \sim \pi_{\theta_t}} \big[ \big( \nabla_\theta \log \pi_\theta(x) \big)^T \big( \nabla_\theta \log \pi_\theta(x) \big) \big]\]替换为逐层计算
\[\color{green}{\begin{aligned} F_{\ell} &= \mathbb{E}[\operatorname{vec} \{\nabla_W L\} \operatorname{vec}\{\nabla_W L\}^T] = \mathbb{E}[a a^T \otimes \nabla_s L (\nabla_s L)^T] \\ & \approx \mathbb{E}[a a^T] \otimes \mathbb{E}[\nabla_s L (\nabla_s L)^T] := A \otimes S :=\hat{F}_{\ell} \end{aligned}}\]其中,\(A\)表示\(\mathbb{E}[a a^T]\),\(S\)表示\(\mathbb{E}[\nabla_s L (\nabla_s L)^T]\)。
随机梯度下降(SGD)是一阶优化,广泛用于网络优化;自然梯度下降在迭代方面比一阶方法收敛更快,因为考虑了损失函数的曲率,尽管它需要计算Fisher信息矩阵 \(\theta_{t+1} = \theta_t + \alpha \mathbf{F}^{-1} \nabla_\theta J(\theta)\),其中\(\mathbf{F} = \mathbb{E}_{\pi_\theta(s, a)} [\nabla \log \pi_\theta(s, a) \nabla \log \pi_\theta(s, a)^T ]\)。K-FAC用于大规模神经网络优化的FIM估计。
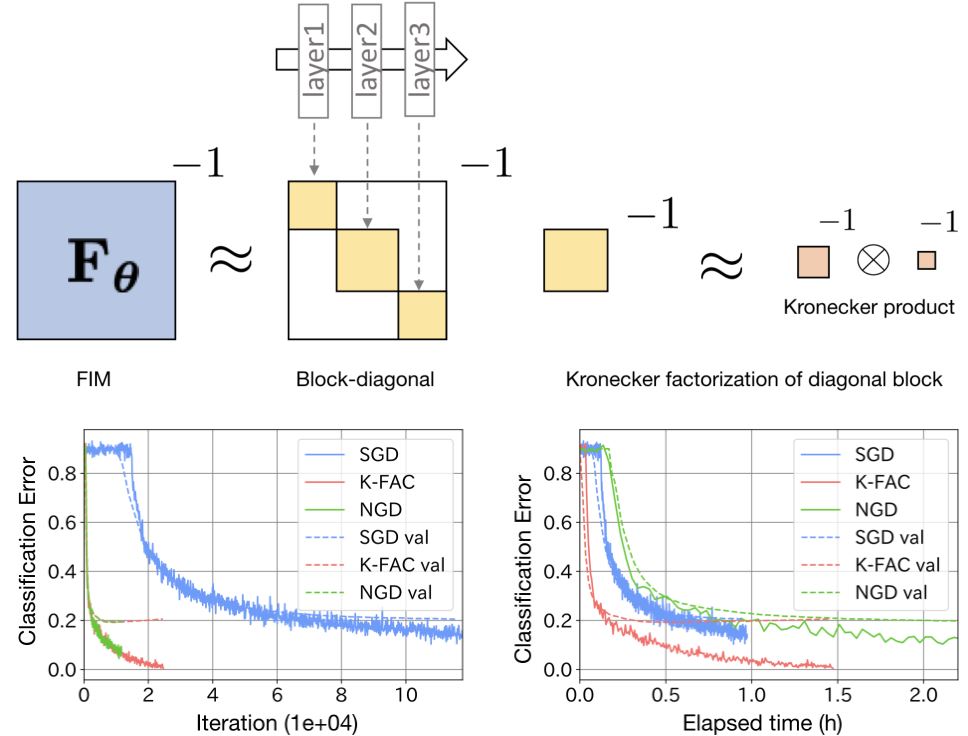
神经网络的FIM是分块对角矩阵,因为每层只和层内的系数相关,所以可以用K-FAC来加速FIM的求逆。
Performance of ACKTR
介绍链接:OpenAI: ACKTR & A2C
6.3 Proximal Policy Optimization
6.3.1 PPO
自然梯度和TRPO中的损失函数
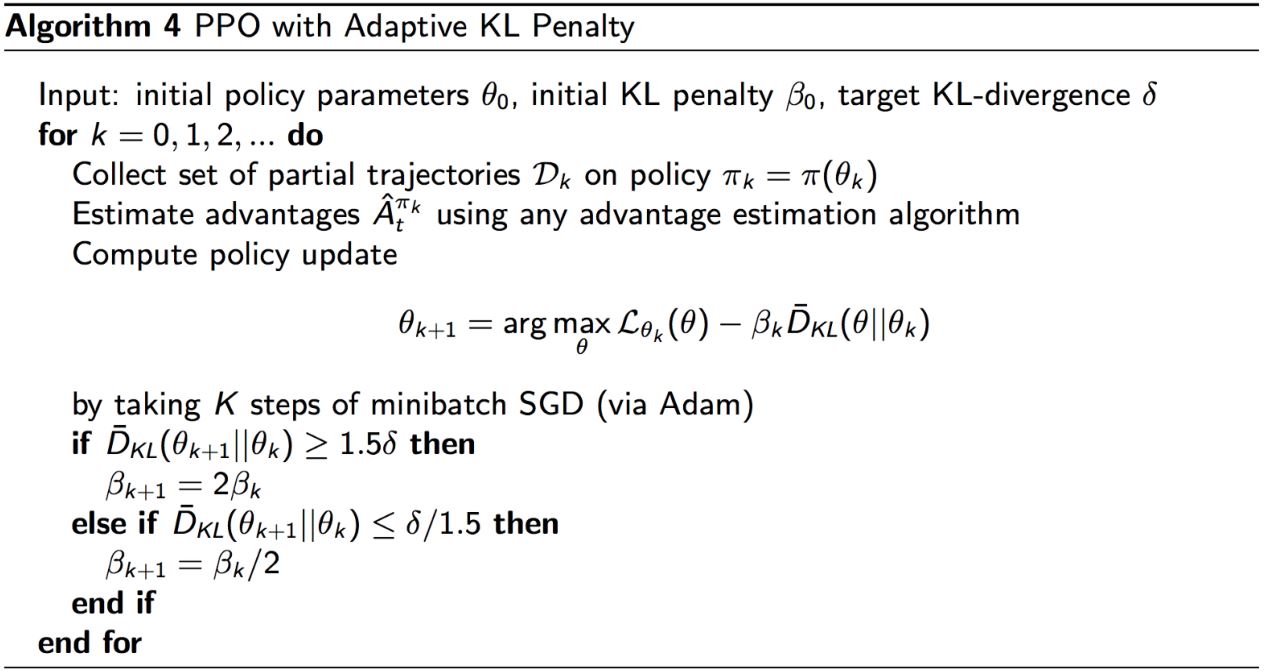
\[\begin{aligned} \max_\theta \quad & \mathbb{E}_t \left[\frac{\pi_\theta(a_t \mid s_t)}{\pi_{\theta_{\text {old }}}(a_t \mid s_t)} A_t\right] \\ \text {s.t.} \quad & \mathbb{E}_t \big[ K L[\pi_{\theta_{\text{old}}}(. \mid s_t), \pi_\theta(. \mid s_t)] \big] \leq \delta \end{aligned}\]也可以写成无约束的形式
\[\color{green}{ \max_\theta \mathbb{E}_t \left[\frac{\pi_\theta(a_t \mid s_t)}{\pi_{\theta_{\text {old }}}(a_t \mid s_t)} A_t\right] - \beta \mathbb{E}_t \big[ K L[\pi_{\theta_{\text{old}}}(. \mid s_t), \pi_\theta(. \mid s_t)] \big] }\]PPO:引入自适应的KL惩罚,所以能更好地保证在置信区域内进行优化。性能与TRPO相当,但是因为用一阶优化(SGD)所以求解速度快很多。
6.3.2 PPO with clipping
用\(r_t(\theta)\)表示概率比\(r_t(\theta) = \frac{\pi_\theta(a_t \vert s_t)}{\pi_{\theta_{\text{old}}}(a_t \vert s_t)}\),所以不同的替代目标有:
1. PG(无置信域):\(L_t(\theta) = r_t(\theta) \hat{A}_t\)
2. KL约束:\(L_t(\theta) = r_t(\theta) \hat{A}_t ,\ \text{s.t. } KL[\pi_{\theta_{\text{old}}}, \pi_\theta] \le \delta\)
3. KL惩罚:\(L_t(\theta) = r_t(\theta) \hat{A}_t - \beta KL[\pi_{\theta_{\text{old}}}, \pi_\theta]\)
如果新策略与旧策略距离很远(r_t很大),就用一个新的目标函数来截断估计的advantage函数
\[\color{green}{ L_t(\theta) = \min \left(r_t(\theta) \hat{A}_t, \operatorname{clip}\left(r_t(\theta), 1-\epsilon, 1+\epsilon\right) \hat{A}_t\right) }\]如果新旧策略的概率比在\(1-\epsilon ,\ 1+\epsilon\)的范围之外,那么advantage函数会被截断。(在PPO论文中,\(\epsilon\)被设为2。)
Clipping的作用类似于一个正则化器,消除了激励策略发生巨大变化的因素。当advantage为正时,我们鼓励动作,因此\(\pi_\theta(a \vert s)\)变大,
\[L\left(\theta ; \theta_{\text{old}}\right) = \min \left( \frac{\pi_\theta(a_t \vert s_t)}{\pi_{\theta_{\text{old}}}(a_t \vert s_t)}, (1 + \epsilon) \right) \hat{A}_t\]当advantage为负时,我们不鼓励动作,因此\(\pi_\theta(a \vert s)\)变小,
\[L\left(\theta ; \theta_{\text{old}}\right) = \max \left( \frac{\pi_\theta(a_t \vert s_t)}{\pi_{\theta_{\text{old}}}(a_t \vert s_t)}, (1 - \epsilon) \right) \hat{A}_t\]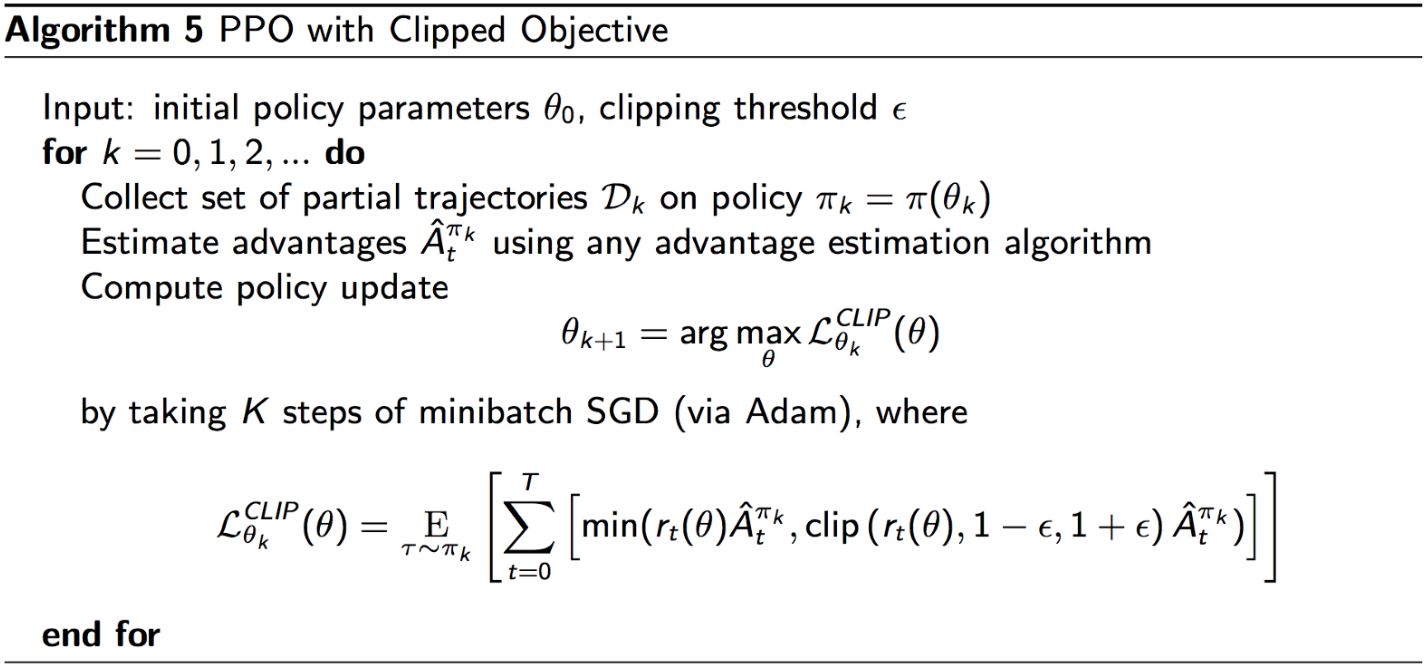
PPO有置信域方法的稳定性和可靠性,实现上却简单很多,只需在原始策略梯度的基础上改几行代码即可实现。
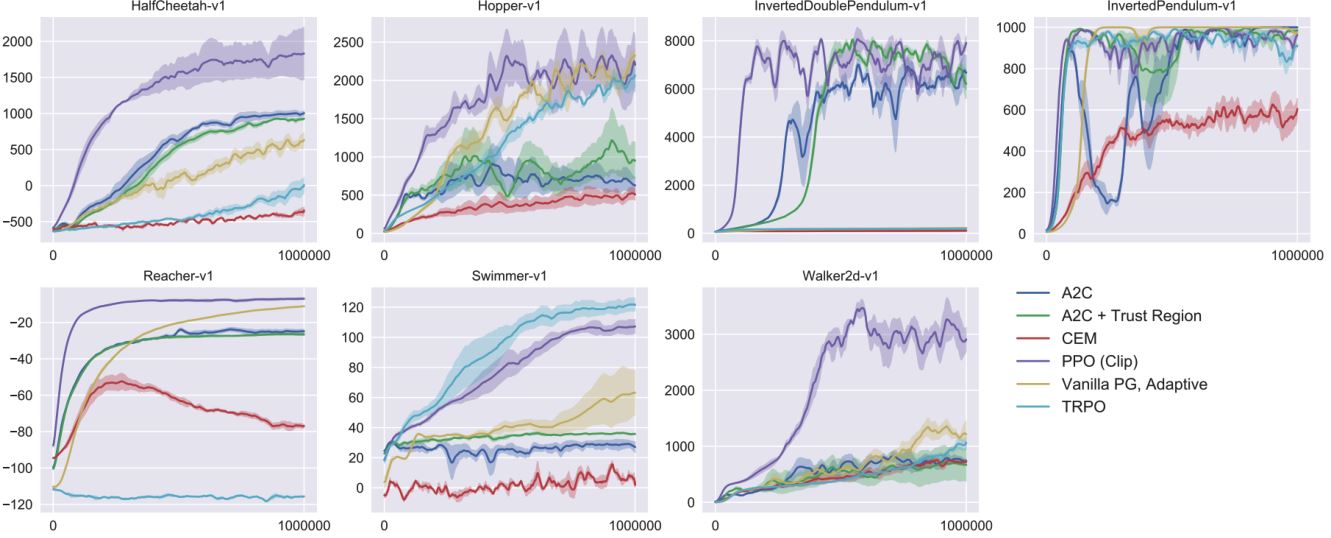
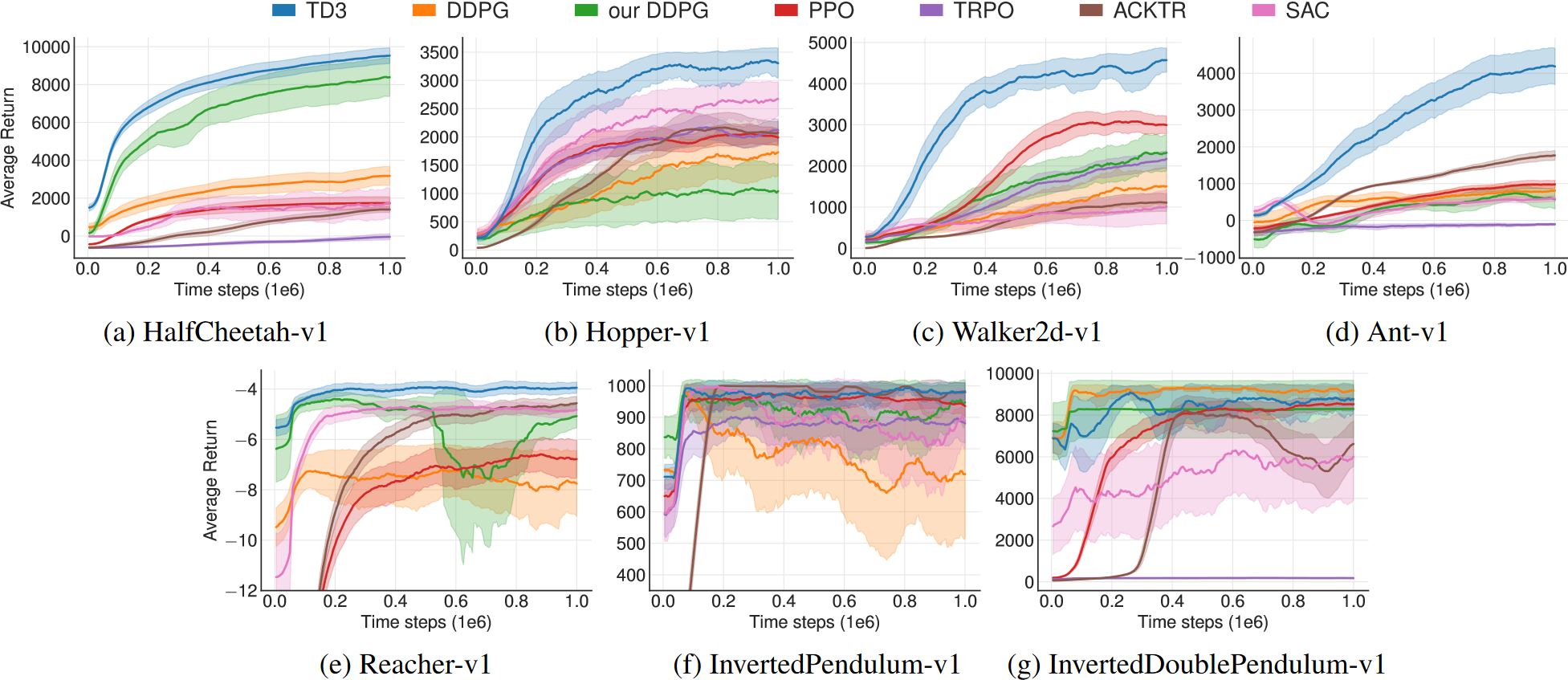
Result of PPO
Demo of PPO (by OpenAI)
复杂环境下运动行为的出现 分布式PPO (by DeepMind)
Code example
目前SOTA的强化学习方法大多是基于策略的。
- TRPO:具有可靠的数学证明和保证,但难以遵循
- ACKTR:基于数值优化的改进,可扩展到实际问题
- PPO:可读性好,损失函数设计优雅,易于实现,广泛使用
6.4 Deep Deterministic Policy Gradient
动机:如何将DQN拓展道连续动作空间的环境中?
DDPG与DQN十分相似,可以看作是DQN的连续动作空间版
\[\begin{aligned} \text{DQN: } & a^* =\underset{a}{\arg \max } Q^*(s, a) \\ \text{DDPG: } & a^* =\underset{a}{\arg \max } Q^*(s, a) \approx Q_\phi(s, \mu_\theta(s)) \end{aligned}\]可以看出,DDPG中确定性策略\(\mu_\theta(s)\)直接给出了最大化\(Q_\phi(s, a)\)的动作。由于动作\(a\)是连续的,所以我们假设Q-函数\(Q_\phi(s, a)\)关于\(a\)是可微的。
因此,DDPG有如下目标:
\[\begin{aligned} \text{Q-target: } & y(r, s^{\prime}, d) = r + \gamma(1-d) Q_{\phi_{targ}}(s^{\prime}, \mu_{\theta_{targ}}(s^{\prime})) \\ \text{Q-function: } & \min \mathbb{E}_{s, r, s^{\prime}, d \sim \mathcal{D}}[Q_\phi(s, a) - y(r, s^{\prime}, d)] \\ \text{policy: } & \max_\theta \mathbb{E}_{s \sim \mathcal{D}}[Q_\phi(s, \mu_\theta(s))] \end{aligned}\]对价值和策略网络应用经验回放及目标网络的trick是和DQN里一样的。DDPG的示例代码(采用与TD3一样的样本代码库)
6.5 Twin Delayed DDPG (TD3)
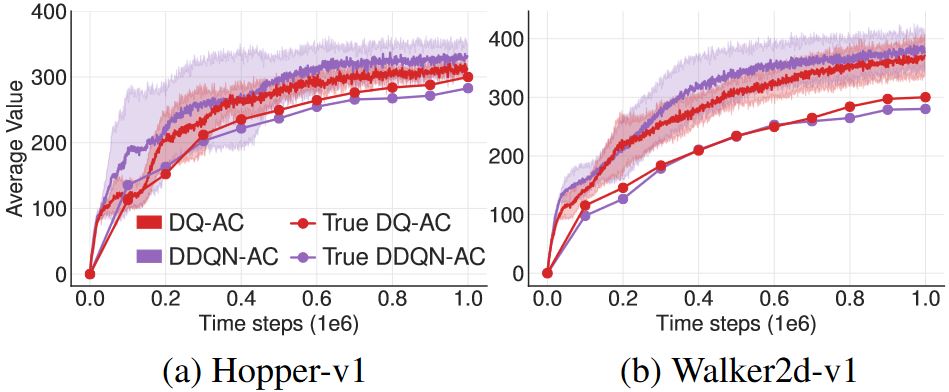
DDPG的一个主要缺点就是学到的\(Q\)函数有时会显著地高估\(Q\)值,导致策略崩盘。真实价值是通过沿当前策略执行1000个episode以上的平均折扣return得来的。
TD3提出了三点改进(tricks?)
- Clipped Double-Q Learning. TD3学习两个\(Q\)函数而不是一个("twin"的含义),并用两个\(Q\)值中较小的那个生成Bellman误差损失函数中的目标。
- "Delayed" Policy Updates. TD3以比\(Q\)函数更新频率更低的频率更新策略(和目标网络)。原文推荐每两次\(Q\)函数更新对应一次策略更新。
- Target Policy Smoothing. TD3在目标动作中加入噪声,使得策略更难通过沿着动作的变化平滑\(Q\)来利用\(Q\)函数误差。
TD3同时学习两个\(Q\)函数,\(Q_{\phi_1}\)和\(Q_{\phi_2}\),通过最小化均方Bellman误差。两个\(Q\)函数都用同一个目标,使用两个\(Q\)函数给出的较小的那个值作为后续的\(Q\)-target:
\[y(r, s^{\prime}, d) = r + \gamma(1-d) \min _{i=1,2} Q_{\phi_{i, targ}}(s^{\prime}, \color{green}{a_{TD3}(s^{\prime})} \color{balck}{)}\]目标策略平滑如下:
\[\color{green}{a_{TD3}(s^{\prime})} = \color{black}{ \operatorname{clip} \left( \mu_{\theta, \operatorname{targ}}(s^{\prime}) + \operatorname{clip}(\epsilon,-c, c), a_{low}, a_{high} \right), \epsilon \sim \mathcal{N}(0, \sigma) }\]这步的作用和正则化一样:防止策略的动作输出包含错误的尖峰。
作者的Pytorch实现(非常简洁的实现!)这个仓库下还有DDPG与TD3不同之处的对比。
6.6 Soft Actor-Critic (SAC)
SAC以离策略的方式优化了一个随机策略,统一了随机策略优化和DDPG风格的方法。SAC引入了entropy regularization,熵是描述一个随机变量的随机程度的量,\(H(P) = \mathbb{E}_{x \sim P}[- \log P(x)]\)。
Entropy-regularized RL:策略被训练来最大化期望return和熵之间的平衡。
\[\color{green}{ \pi^* = \arg \max \mathbb{E}_{\tau \sim \pi} \left[ \sum_t \gamma^t (R(s_t, a_t, s_{t+1}) + \alpha H(\pi(. \mid s_t))) \right] }\]价值函数中加入每个时间的熵
\[V^\pi(s) = \mathbb{E}_{\tau \sim \pi} \left[ \sum_t \gamma^t(R(s_t, a_t, s_{t+1}) + \alpha H(\pi(. \mid s_t))) \mid s_0 = s \right]\]熵归一化的\(Q^\pi\)的Bellman递归方程
\[\begin{aligned} Q^\pi(s, a) &= \mathbb{E}_{s^{\prime} \sim P, a^{\prime} \sim \pi} [R(s, a, s^{\prime}) + \gamma(Q^\pi(s^{\prime}, a^{\prime}) + \alpha H(\pi(. \mid s^{\prime})))] \\ &= \mathbb{E}_{s^{\prime} \sim P, a^{\prime} \sim \pi} [R(s, a, s^{\prime}) + \gamma(Q^\pi(s^{\prime}, a^{\prime}) - \alpha \log \pi(a^{\prime} \mid s^{\prime}))] \end{aligned}\]所以,Q函数的采样更新为
\[Q^\pi(s, a) \approx r + \gamma (Q^\pi(s^{\prime}, \hat{a}^{\prime}) - \alpha \log \pi(\hat{a}^{\prime} \mid s^{\prime})),\ \hat{a}^{\prime} \sim \pi(. \mid s^{\prime})\]SAC同时学习一个策略\(\pi_\theta\)和两个Q函数\(Q_{\phi_1}\)、\(Q_{\phi_1}\)。和TD3一样,共用的目标中使用了clipped Double-Q trick,两个Q函数都是通过最小化Bellman均方差的方式来学习的。
\[\begin{aligned} L(\phi_i, \mathcal{D}) &= \mathbb{E}[(Q_\phi(s, a) - y(r, s^{\prime}, d)^2] \\ y(r, s^{\prime}, d) &= r + \gamma (1-d) \left( \min _{j=1,2} Q_{\phi_{\text{targ}, j}}(s^{\prime}, \hat{a}^{\prime}) - \alpha \log \pi(\hat{a}^{\prime} \mid s^{\prime}) \right),\ \hat{a}^{\prime} \sim \pi_\theta(. \mid s^{\prime}) \end{aligned}\]策略是通过最大化期望未来return与期望未来熵的和来学习的,因此最大化
\[\begin{aligned} V^\pi(s) &= \mathbb{E}_{a \sim \pi}[Q^\pi(s, a) + \alpha H(\pi(. \mid s))] \\ &= \mathbb{E}_{a \sim \pi}[Q^\pi(s, a) - \alpha \log \pi(a \mid s)] \end{aligned}\]
