Proximal Policy Optimization
PP是OpenAI默认的强化学习算法。

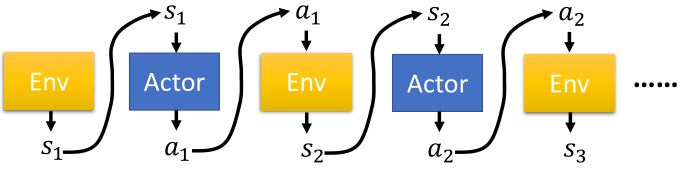
2.1 Review on PG
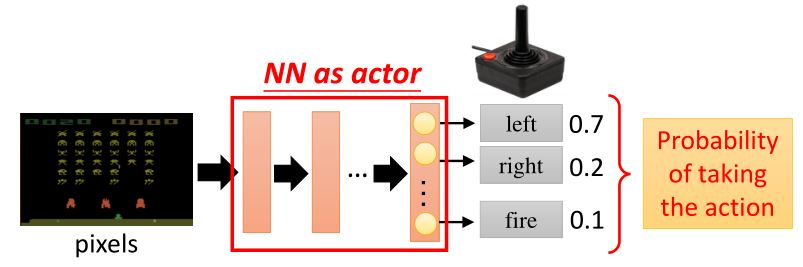
策略\(\pi\)是一个关于参数\(\theta\)的网络
- 输入:机器所观察到的内容,表示成一个向量或矩阵
- 输出:每个动作对应于输出层的一个神经元
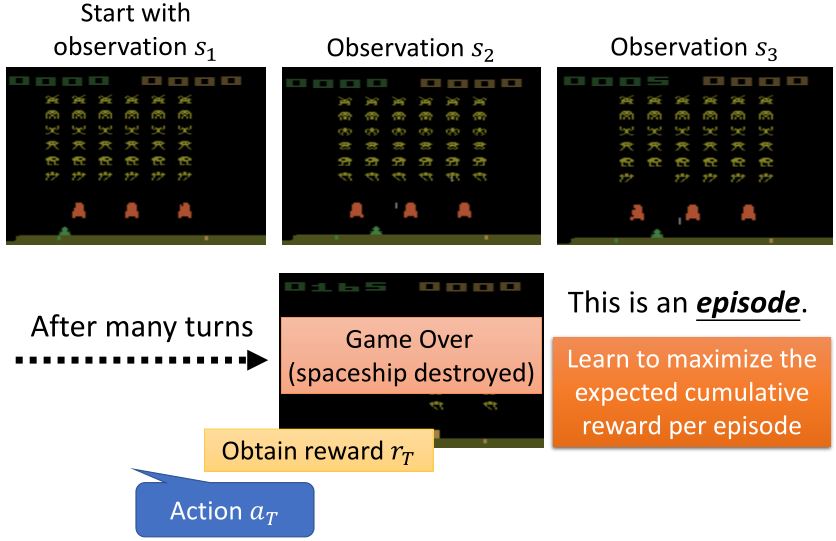
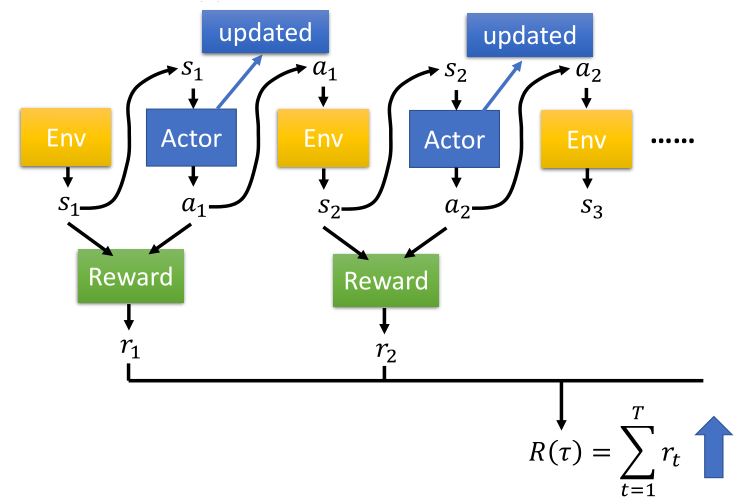
要使期望奖励最大,利用梯度上升法来更新参数。
\[\begin{aligned} \text{policy gradient } \nabla \bar{R_{\theta}} =& \sum_{\tau} R_{\tau} \nabla p_{\theta}(\tau) = \sum_{\tau} R_{\tau} p_{\theta}(\tau) \nabla \log p_{\theta}(\tau) = \mathbb{E}_{\tau \sim p_{\theta}(\tau)} [R_{\tau} \nabla \log p_{\theta}(\tau)] \\ \approx & \frac{1}{N} \sum_{n=1}^N R(\tau^n) \nabla \log p_{\theta}(\tau^n) = \frac{1}{N} \sum_{n=1}^N \sum_{t=1}^{T_n} R(\tau^n) \nabla \log p_{\theta}(a_{t}^n \mid s_{t}^n) \end{aligned}\]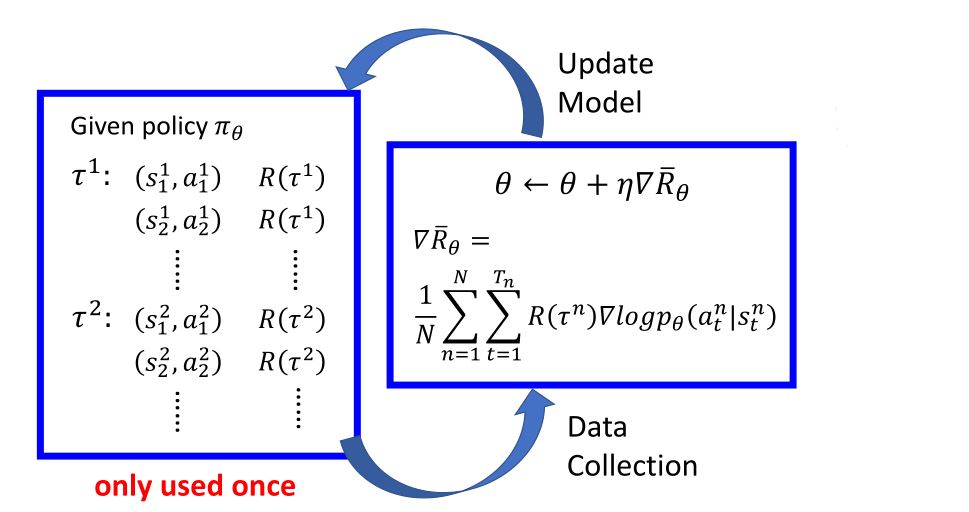
2.1.1 Implementation
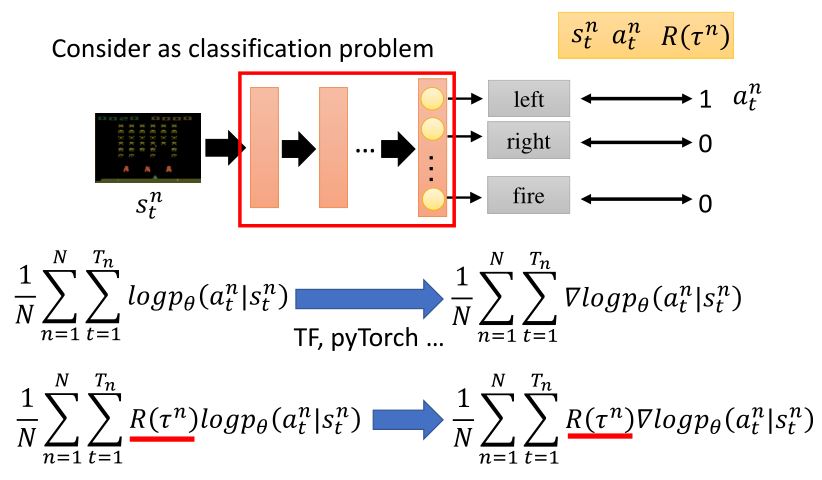
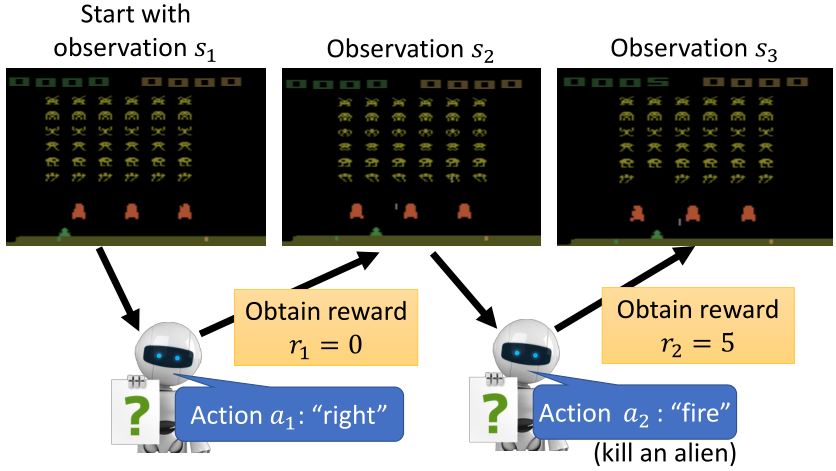
如果从分类问题的角度看,将状态作为输入,每个行为看作是一个标签,那么输出就应该是每种类型对应的概率。可以看出,强化学习的过程相比于分类问题多了一个total reward。
2.1.2 Tips
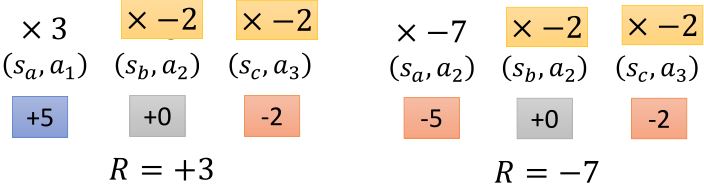
1. Add a baseline
可能存在\(R(\tau^n)\)一直为正的情况(e.g. 打乒乓球),所以需要减去一个\(b\)。
\[\begin{aligned} &\theta^{new} \leftarrow \theta^{old} + \eta \nabla \bar{R}_{\theta^{old}} \\ &\nabla \bar{R_{\theta}} \approx \frac{1}{N} \sum_{n=1}^N \sum_{t=1}^{T_n} \big(R(\tau^n) - b\big) \nabla \log p(a_{t}^n \mid s_{t}^n, \theta) \quad b \approx \mathbb{E}[R(\tau)] \end{aligned}\]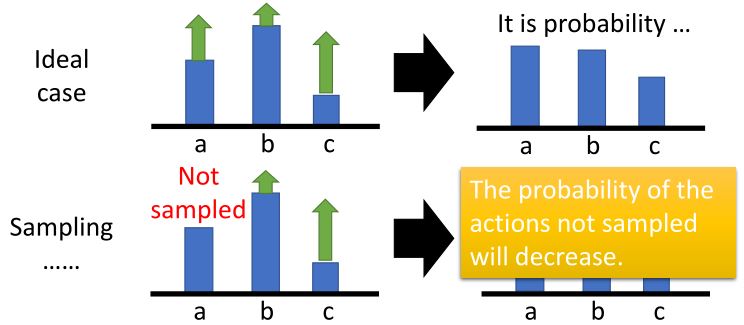
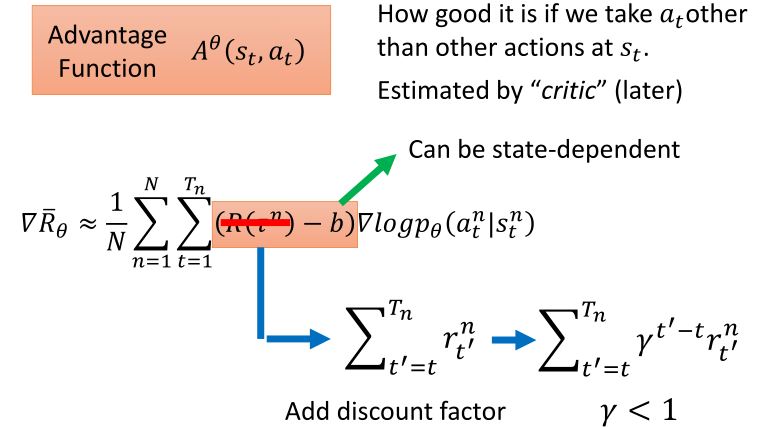
2. Assign suitable credit
在一个episode中,可能有好的action和不好的action,一个trajectory得到的total reward高并不能代表所有的action都很好。如果我们可以采样足够多次,那么就可以避免这个问题。但是,现在我们的采样次数有限,所以要给每个action一个credit,将total reward改为从某个行为被执行后累计的reward,并添加折扣因子。
2.2 On-policy → Off-policy
- On-policy:学习到的agent和与环境交互的agent是同一个
- Off-policy:学习到的agent和与环境交互的agent是不同的
- 用策略\(\pi_{\theta}\)收集数据,当\(\theta\)被更新时,必须要重新采样训练数据
- 目标:用从策略\(\pi_{\theta '}\)的采样来训练\(\theta\)。\(\theta '\)是固定的,所以其采样数据可以重用。
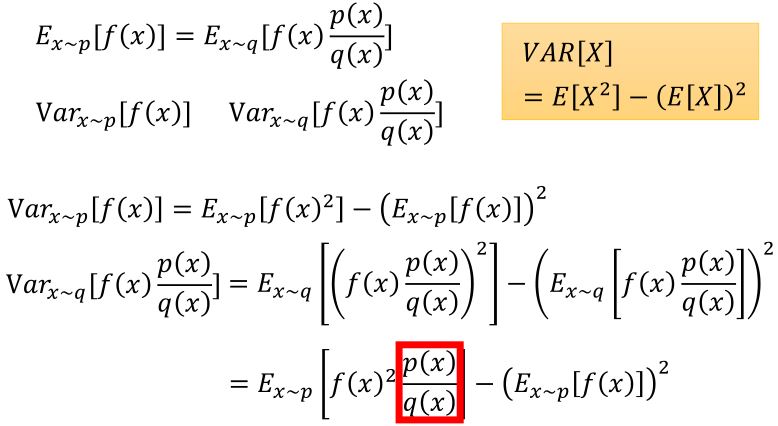
重要性采样
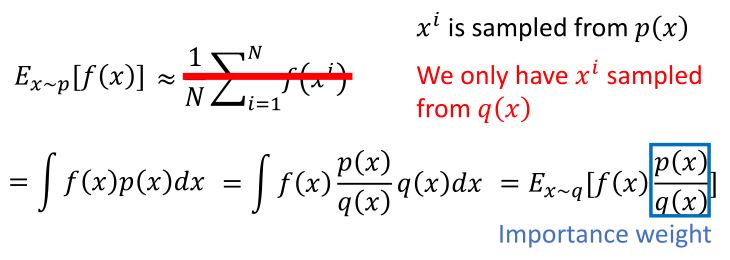
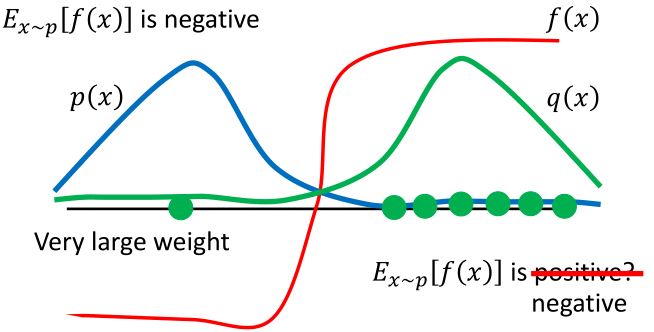
理论上,两个概率分布的期望是一样的,但是方差不一样。所以要有足够多的样本,并且两个概率分布的差距不能太大。
利用重要性采样,\(\nabla \bar{R}_{\theta} = E_{\tau \sim p_{\theta}(\tau)} \left[ R(\tau) \nabla \log p_{\theta}(\tau) \right] = E_{\tau \sim p_{\theta'}(\tau)} \left[ \frac{p_{\theta}(\tau)}{p_{\theta^{\prime}}(\tau)} R(\tau) \nabla \log p_{\theta}(\tau) \right]\),从\(\theta '\)采样数据,多次训练\(\theta\)。
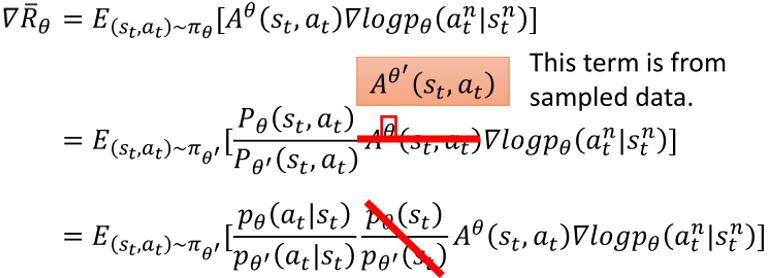
目标函数可以写成\(J^{\theta'}(\theta) = = E_{(s_t, a_t) \sim \pi_{\theta'}} \left[ \frac{p_{\theta}(a_t \mid s_t)}{p_{\theta^{\prime}}(a_t \mid s_t)} A^{\theta'} (s_t, a_t) \right]\)
2.3 Add Constraint
因为重要性采样要求两个概率分布的差距不能太大,在PPO (Proximal Policy Optimization)中增加了一个\(KL(\theta, \theta')\)的约束
\[\begin{aligned} J_{PPO}^{\theta'}(\theta) &= J^{\theta'}(\theta) - \beta KL(\theta, \theta') \\ J^{\theta'}(\theta) &= E_{(s_t, a_t) \sim \pi_{\theta'}} \left[ \frac{p_{\theta}(a_t \mid s_t)}{p_{\theta^{\prime}}(a_t \mid s_t)} A^{\theta'} (s_t, a_t) \right] \end{aligned}\]在TRPO (Trust Region Policy Optimization)中,这个约束的位置和PPO不一样。两种方法的效果相差不大,但是PPO更容易实现。
\[J_{PPO}^{\theta'}(\theta) = E_{(s_t, a_t) \sim \pi_{\theta'}} \left[ \frac{p_{\theta}(a_t \mid s_t)}{p_{\theta^{\prime}}(a_t \mid s_t)} A^{\theta'} (s_t, a_t) \right] \quad KL(\theta, \theta') \le \delta\]这里的KL距离(相对熵)指的是action的距离(即在两种概率分布下action出现的概率要相似),而不是指参数θ的距离。
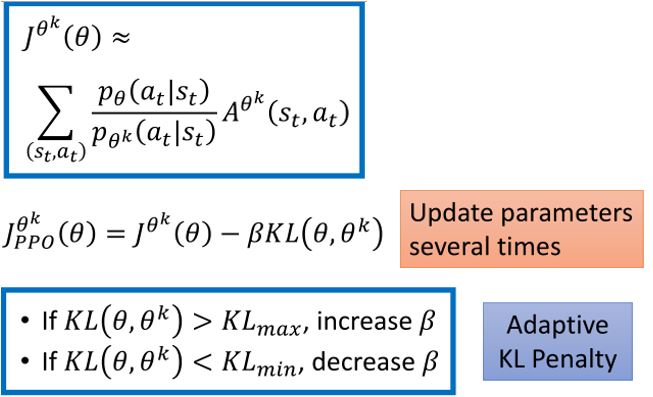
2.3.1 PPO algorithm
- 初始化策略参数\(\theta^0\)
- 在每次迭代中
用\(\theta^k\)和环境交互收集\(\{ s_t, a_t \}\)并计算advantage \(A^{\theta^k} (s_t, a_t)\)
找出能最优化\(J_{PPO}(\theta)\)的\(\theta\)
2.3.2 PPO2 algorithm
\[J_{PPO2}^{\theta^{k}}(\theta) \approx \sum_{(s_{t}, a_{t})} \min \left( \frac{p_{\theta} (a_t \mid s_t)}{p_{\theta^k}\left(a_t \mid s_t\right)} A^{\theta^k}(s_t, a_t) , \operatorname{clip} \left(\frac{p_{\theta}\left(a_{t} \mid s_{t}\right)}{p_{\theta^{k}}\left(a_{t} \mid s_{t}\right)}, 1-\varepsilon, 1+\varepsilon\right) A^{\theta^k}(s_t, a_t) \right)\]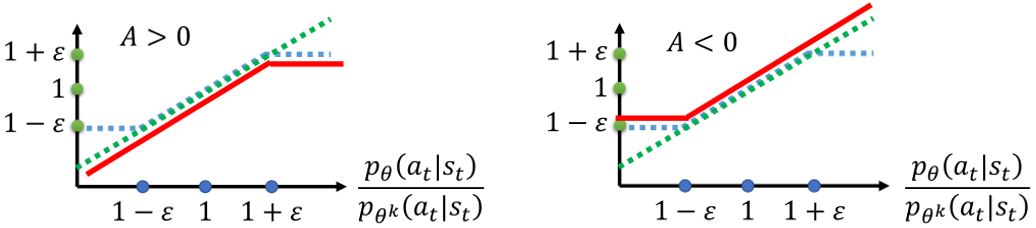
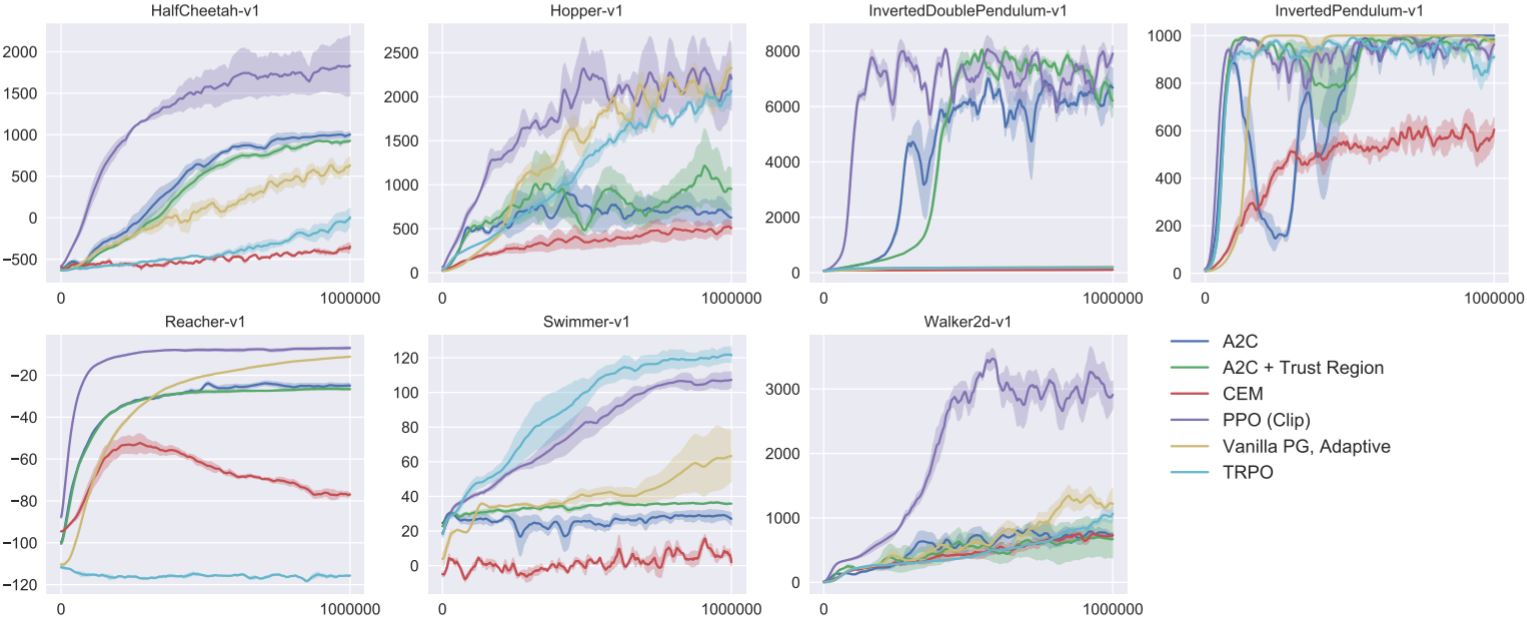
2.3.3 Experimental results
参考文献:Proximal Policy Optimization Algorithms