Policy Optimization Ⅰ
5.1 Policy-based RL
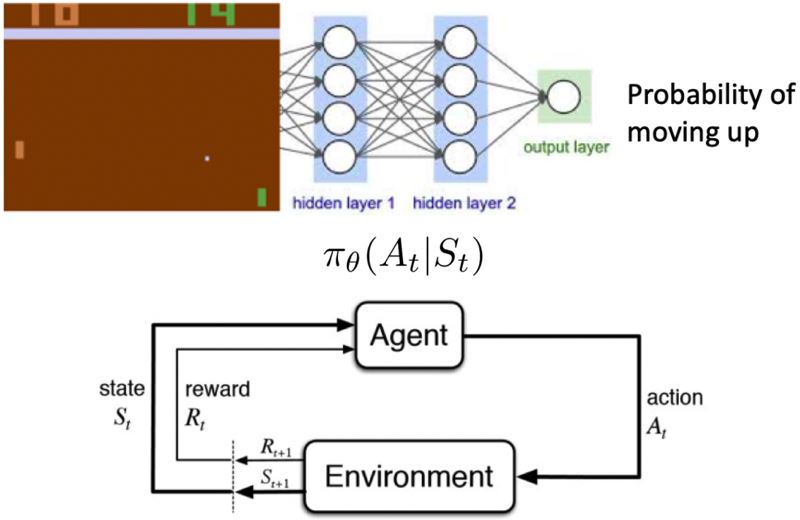
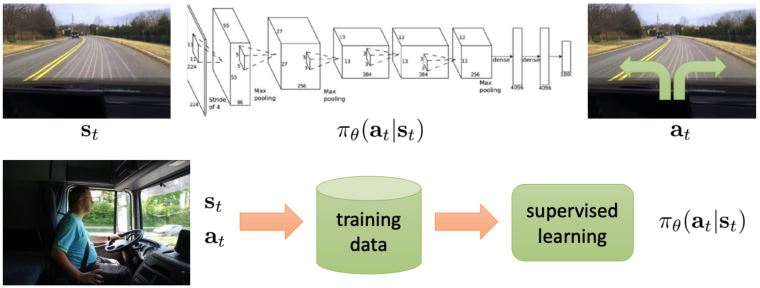
确定性策略是直接从价值函数用贪心策略\(a_t = \text{arg} \max_a Q(a, s_t)\)得到的。与之相反,可以使用将策略函数参数化表示为\(\color{green}{\pi_{\theta} (a \vert s)}\),其中\(\color{green}{\theta}\)是可学习的策略参数,输出是动作集上的概率。对于策略优化,只需要知道策略中的动作,然后直接优化策略。
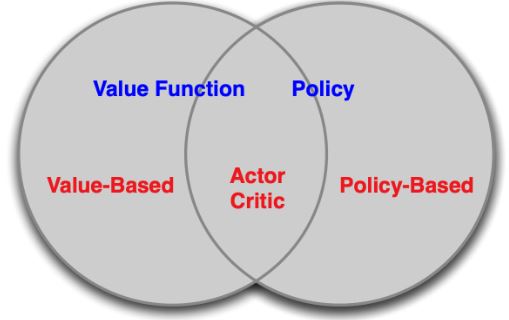
Value-based RL vs. Policy-based RL:
- value-based RL:学习价值函数 基于价值函数的隐性策略
- policy-based RL:没有价值函数 直接学习策略
- actor-critic:学习策略函数和价值函数
基于策略的强化学习优势:
- 更好的收敛性:能保证收敛到某个局部最优(最差的情况)或全局最优(最好的情况)
- 策略梯度对于高维动作空间更高效
- 策略梯度可以学习随机策略,而价值函数不可以
劣势:
- 一般都会收敛到局部最优
- 评估策略的方差很大
两种策略:
- 确定性:给定一个状态,策略会返回一个确定的动作来采取。
- 随机性:给定一个状态,策略会返回动作的概率分布(e.g. 40%的概率向左转,60%的概率向右转)或连续动作的某个高斯分布。
例:石头剪刀布
该游戏有两个玩家,什么样的策略是最好的呢?如果策略是固定的,那么很容易被打败。所以,均匀随机策略是最优的(Nash均衡)。
例:aliased gridworld
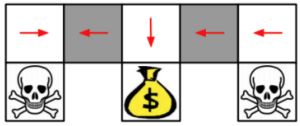
在这个游戏中,agent无法分辨这两个灰色的格子。考虑以下特性(对于所有的上下左右),\(\psi (s, a) = [1(\text{上面是墙}, a = \text{向右移}), 1(\text{下面是墙}, a = \text{向左移}), \ldots]\)。
如果是基于价值的RL,价值函数近似为\(Q_{\theta} (s, a) = f(\psi(s, a), \theta)\)
如果是基于策略的RL,策略函数近似为\(\phi_{\theta} (s, a) = g(\psi(s, a), \theta)\)
基于价值的RL会学到一个确定策略,e.g. 贪心。因为无法区分两个灰色格子,所以得到的最优确定性策略要么就是都往左(如图所示),要么就是都往右。不管是哪个,都有50%的概率会卡住。
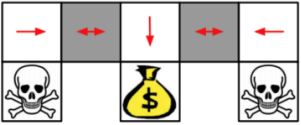
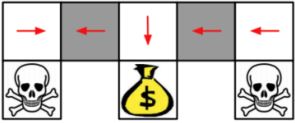
基于策略的RL会学到一个随机策略。一个最优的随机性策略会在遇到这两个灰色格子的状态下,随机选择向左或向右,以一半一半的概率。这样对于任何一个起始点,agent都很有可能在几步之内到达目标状态。
5.1.1 Objective of optimizing policy
目标:给定义一个关于参数\(\theta\)的策略近似器\(\pi_{\theta}(s,a)\),找到最好的\(\theta\)
问:如何衡量策略\(\pi_{\theta}\)的质量?
在episodic环境中,可以用第一个值
\[J_{1}(\theta) = V^{\pi_{\theta}}\left(s_{1}\right) = \mathbb{E}_{\pi_{\theta}}\left[v_{1}\right]\]在连续环境中,可以用平均价值
\[J_{a v V}(\theta) = \sum_{s} d^{\pi_{\theta}}(s) V^{\pi_{\theta}}(s)\]或每个时间步长的平均奖励
\[J_{a v R}(\theta) = \sum_{s} d^{\pi_{\theta}}(s) \sum_{a} \pi_{\theta}(s, a) R(s, a)\]其中,\(d^{\pi_{\theta}}\)是\(\pi_{\theta}\)下Markov链的静态分布。
策略的价值的定义:
\[\color{green}{\begin{aligned} J(\theta) &= \mathbb{E}_{\tau \sim \pi_{\theta}}\left[\sum_{t} R\left(s_{t}^{\tau}, a_{t}^{\tau}\right)\right] \\ & \approx \frac{1}{m} \sum_{m} \sum_{t} R\left(s_{t}^{m}, a_{t}^{m}\right) \end{aligned}}\]这和先前在基于价值的强化学习中定义的价值函数是一样的。
- 这里\(\tau\)是按策略函数\(\pi_{\theta}\)采样的轨迹
- 这里先忽略折扣因子
基于策略的强化学习的目标:
\[\color{green}{ \theta^* = \text{arg} \max_{\theta} \mathbb{E}_{\tau \sim \pi_{\theta}} \left[\sum_{t} R\left(s_{t}^{\tau}, a_{t}^{\tau}\right)\right] }\]5.1.2 Policy optimization
基于策略的强化学习是一个优化问题,找到能最大化\(J(\theta)\)的\(\theta\)。
如果\(J(\theta)\)是可微的,那么可以使用基于梯度的方法:1. 梯度上升 2. 共轭梯度 3. 准牛顿法
如果\(J(\theta)\)是不可微的,或者导数计算比较麻烦,那么可以使用一些无需导数的黑箱优化方法:1. 交叉熵法(CEM) 2. 爬山算法 3. 进化算法
Using derivative
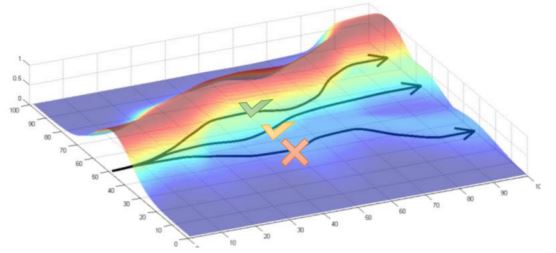
函数\(J(\theta)\)为策略目标函数。目标:通过沿策略的梯度上升,找到能够使\(J(\theta)\)最大的参数\(\theta^*\)。沿梯度方向调整\(\theta\),其中\(\alpha\)为步长。
\[\Delta \theta = \alpha \nabla_{\theta} J(\theta)\]定义\(J(\theta)\)的梯度为\(\nabla_{\theta} J(\theta) = \left( \frac{\partial J(\theta)}{\partial \theta_1}, \frac{\partial J(\theta)}{\partial \theta_2}, \cdots, \frac{\partial J(\theta)}{\partial \theta_n}, \right)^T\)。
Using derivative-free methods
1. Cross-entropy method (CEM)
- 最优参数\(\theta^* = \text{arg} \max J(\theta)\)
- 把\(J(\theta)\)当作一个黑箱得分函数(不可微)
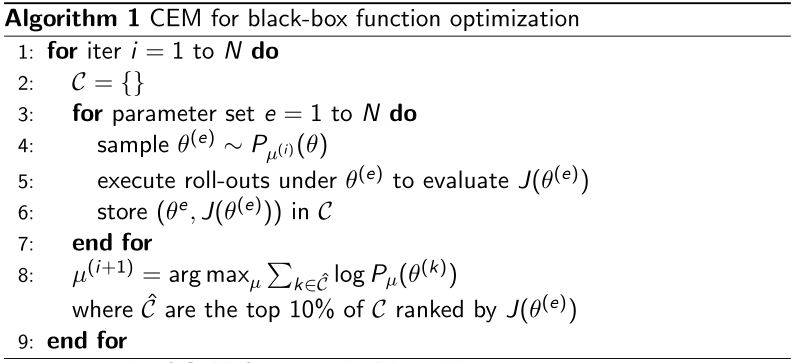
在有些环境中,基于CEM的方法非常高效,可能比可以优化的强化学习办法效果好。
2. Approximate Gradients by Finite Difference
要评估\(\pi_{\theta}(s, a)\)的策略梯度,对于每个维度\(k \in [1, n]\),通过在\(\theta\)的第\(k\)维附近制造一个小的扰动量\(\epsilon\)来估计目标函数的第\(k\)个偏微分。
\[\frac{\partial J(\theta)}{\partial \theta_k} \approx \frac{J(\theta + \epsilon u_k) - J(\theta)}{\epsilon}\]其中,\(u_k\)是第\(k\)个元素为1,其余元素为0的单位向量。
尽管这个方法有噪声且效率低,但是它对任意策略都有效,即使策略是不可微的。
5.1.3 Computing the PG analytically
假设策略\(\pi_{\theta}\)在非零时是可微的,可以计算出它的梯度为\(\nabla_{\theta} \pi_{\theta} (s, a)\)。利用似然比的技巧
\[\nabla_{\theta} \pi_{\theta} (s, a) = \pi_{\theta} (s, a) \frac{\nabla_{\theta} \pi_{\theta} (s, a)}{\pi_{\theta} (s, a)} = \pi_{\theta} (s, a) \nabla_{\theta} \log \pi_{\theta} (s, a)\]得分函数(score function)为\(\nabla_{\theta} \log \pi_{\theta} (s, a)\)。
Policy example: softmax policy
- 简单策略模型:用特征的线性组合\(\phi (s,a)^T \theta\)来衡量动作
- 动作的概率与期望权重成正比 \(\pi_{\theta} (s, a) = \frac{\exp^{\phi (s,a)^T \theta}}{\sum_{a'} \exp^{\phi (s,a')^T \theta}}\)
- 得分函数为\(\nabla_{\theta} \log \pi_{\theta} (s, a) = \phi (s, a) - \mathbb{E}_{\pi_{\theta}} [\phi (s, .)]\)
Policy example: Gaussian policy
在连续动作空间中,可以定义一个高斯策略
- 均值是状态特征的线性组合 \(\mu(s) = \phi(s)^T \theta\)
- 方差可以固定为\(\sigma^2\)或者是参数化的
- 策略是高斯分布的、连续的 \(a \sim \mathcal{N}(\mu(s), \sigma^2)\)
- 得分函数为\(\nabla_{\theta} \log \pi_{\theta} (s, a) = \frac{(a - \mu(s)) \phi(s)}{\sigma^2}\)
5.2 Monte-Carlo Policy Gradient
5.2.1 PG for one-step MDPs
考虑一类简单的one-step MAPs,从状态\(s \sim d(s)\)开始,在一步之后结束,奖励为\(r = R(s, a)\)。用似然比来计算策略梯度
\[J(\theta) = \mathbb{E}_{\pi_{\theta}} [r] = \sum_{s \in \mathcal{S}} d(s) \sum_{a \in \mathcal{A}} \pi_{\theta}(s, a) r\]梯度为
\[\begin{aligned} \nabla_{\theta} J(\theta) =& \sum_{s \in \mathcal{S}} d(s) \sum_{a \in \mathcal{A}} \pi_{\theta}(s, a) \nabla_{\theta} \log \pi_{\theta}(s, a) r \\ =& \mathbb{E}_{\pi_{\theta}} [r \nabla_{\theta} \log \pi_{\theta}(s, a)] \end{aligned}\]5.2.2 PG for multi-steps MDPs
从一个episode得到的状态-动作轨迹可以表示为\(\tau=\left(s_{0}, a_{0}, r_{1}, \ldots s_{T-1}, a_{T-1}, r_{T}, s_{T}\right) \sim\left(\pi_{\theta}, P\left(s_{t+1} \mid s_{t}, a_{t}\right)\right)\),沿着轨迹\(\tau\)得到的奖励总和为\(R(\tau) = \sum_{t=0}^{T-1} R(s_t, a_t)\)。
策略目标为
\[J(\theta) = \mathbb{E}_{\pi_{\theta}}\left[\sum_{t=0}^{T-1} R\left(s_{t}, a_{t}\right)\right] = \sum_{\tau} P(\tau ; \theta) R(\tau)\]其中\(P(\tau ; \theta)=\mu\left(s_{0}\right) \prod_{t=0}^{T-1} \pi_{\theta}\left(a_{t} \mid s_{t}\right) p\left(s_{t+1} \mid s_{t}, a_{t}\right)\)表示当执行策略\(\pi_{\theta}\)时沿轨迹\(\tau\)的概率。
我们的目标就是找到策略参数\(\theta\)
\[\theta^{*} = \underset{\theta}{\arg \max} J(\theta) = \underset{\theta}{\arg \max} \sum_{\tau} P(\tau ; \theta) R(\tau)\]对\(\theta\)求梯度
\[\begin{aligned} \nabla_{\theta} J(\theta) &= \nabla_{\theta} \sum_{\tau} P(\tau ; \theta) R(\tau) \\ &= \sum_{\tau} \nabla_{\theta} P(\tau ; \theta) R(\tau) \\ &= \sum_{\tau} \frac{P(\tau ; \theta)}{P(\tau ; \theta)} \nabla_{\theta} P(\tau ; \theta) R(\tau) \\ &= \sum_{\tau} P(\tau ; \theta) R(\tau) \frac{\nabla_{\theta} P(\tau ; \theta)}{P(\tau ; \theta)} \\ &= \sum_{\tau} P(\tau ; \theta) R(\tau) \nabla_{\theta} \log P(\tau ; \theta) \end{aligned}\]用在策略\(\pi_{\theta}\)下的\(m\)条采样路径的经验估计来近似
\[\nabla_{\theta} J(\theta) \approx \frac{1}{m} \sum_{i=1}^{m} R\left(\tau_{i}\right) \nabla_{\theta} \log P\left(\tau_{i} ; \theta\right)\]将轨迹分解为状态和动作
将\(\nabla_{\theta} \log P\left(\tau_{i} ; \theta\right)\)分解
\[\begin{aligned} \nabla_{\theta} \log P(\tau ; \theta) &= \nabla_{\theta} \log \left[\mu\left(s_{0}\right) \prod_{t=0}^{T-1} \pi_{\theta}\left(a_{t} \mid s_{t}\right) p\left(s_{t+1} \mid s_{t}, a_{t}\right)\right] \\ &= \nabla_{\theta}\left[\log \mu\left(s_{0}\right)+\sum_{t=0}^{T-1} \log \pi_{\theta}\left(a_{t} \mid s_{t}\right)+\log p\left(s_{t+1} \mid s_{t}, a_{t}\right)\right] \\ &= \sum_{t=0}^{T-1} \nabla_{\theta} \log \pi_{\theta}\left(a_{t} \mid s_{t}\right) \end{aligned}\]利用likelihood ratio trick,在求偏微分时,通过log把连乘转换成连加,并且只留下了score function的那一项。
5.2.3 Likelihood ratio PG
我们的目标就是找到策略参数\(\theta\),
\[\theta^{*} = \underset{\theta}{\arg \max} J(\theta) = \underset{\theta}{\arg \max} \sum_{\tau} P(\tau ; \theta) R(\tau)\]用在策略\(\pi_{\theta}\)下的\(m\)条采样路径的经验估计来近似\(\nabla_{\theta} J(\theta) \approx \frac{1}{m} \sum_{i=1}^{m} R\left(\tau_{i}\right) \nabla_{\theta} \log P\left(\tau_{i} ; \theta\right)\)。
然后我们有
\[\nabla_{\theta} \log P\left(\tau_{i} ; \theta\right)=\sum_{t=0}^{T-1} \nabla_{\theta} \log \pi_{\theta}\left(a_{t} \mid s_{t}\right)\] \[\nabla_{\theta} J(\theta) \approx \frac{1}{m} \sum_{i=1}^{m} R\left(\tau_{i}\right) \sum_{t=0}^{T-1} \nabla_{\theta} \log \pi_{\theta}\left(a_{t}^{i} \mid s_{t}^{i}\right)\]无需知道动态模型!!!
5.3 Reduce the Variance of PG
5.3.1 Understanding score function gradient estimator
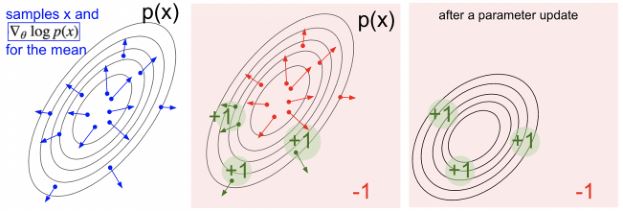
\(\mathbb{E}_{\tau \sim \pi_{\theta}} [R(\tau)]\)的一般形式为计算函数\(f(x)\)期望的梯度,即
\[\begin{aligned} \nabla_{\theta} \mathbb{E}_{p(x;\theta)}[f(x)] &= \mathbb{E}_{p(x;\theta)} [f(x) \nabla_{\theta} \log{p(x;\theta)}] \\ &\approx \frac{1}{S} \sum_{s=1}^S f(x_s) \nabla_{\theta} \log{p(x_s;\theta)} \ , \text{where } x_s \sim p(x;\theta) \end{aligned}\]这个梯度可以理解为:
调整参数\(\theta\)使得分布\(p\)未来的采样\(x\)在\(f(x)\)的评价中更高的得分。
按与方向\(f(x_s) \nabla_{\theta} \log{p(x_s;\theta)}\)有多好成比例地提高样本的对数似然度。
与极大似然相比:
两者的梯度
Policy gradient estimator:\(\nabla_{\theta} J(\theta) \approx \frac{1}{M} \sum_{m=1}^M \left( \sum_{t=1}^T \nabla_{\theta} \log \pi_{\theta}(a_{t,m} \vert s_{t,m}) \right) \left( \sum_{t=1}^T r(a_{t,m} \vert s_{t,m}) \right)\)
Maximum likelihood estimator:\(\nabla_{\theta} J_{ML}(\theta) \approx \frac{1}{M} \sum_{m=1}^M \left( \sum_{t=1}^T \nabla_{\theta} \log \pi_{\theta}(a_{t,m} \vert s_{t,m}) \right)\)
也就是说,好的动作变得更有可能,坏的动作变得更不可能。
Large Variance of Policy Gradient
我们有如下的近似更新:
\[\nabla_{\theta} J(\theta) \approx \frac{1}{m} \sum_{i=1}^m R(\tau_i) \sum_{t=0}^{T-1} \nabla_{\theta} \log \pi_{\theta}(a_t^i \vert s_t^i)\]这个估计是无偏的但是非常noisy(因为对策略梯度的求解是通过MC方法采样来近似的)。两种解决方案:
- Use temporal causality
- Include a baseline
5.3.2 Using causality
之前的策略梯度为\(\nabla_{\theta} \mathbb{E}_{\tau}[R] = \mathbb{E}_{\tau} \left[ \left( \sum_{t=0}^{T-1} r_t \right) \left( \sum_{t=0}^{T-1} \nabla_{\theta} \log \pi_{\theta}(a_t \vert s_t) \right) \right]\),可以理解为根据\(r_t\)对log likelihood做加权,然而前面的log likelihood并不会对后面的reward造成影响,因为实际上\(t=t'\)时刻的reward只受到在\(t=0\)到\(t=t'\)之间的likelihood的影响。
我们可以推导出单个奖励项的梯度估计为
\[\nabla_{\theta} \mathbb{E}_{\tau} [r_t'] = \mathbb{E}_{\tau} [r_t' \sum_{t=0}^{t'} \nabla_{\theta} \log \pi_{\theta}(a_{t} \mid s_{t})]\]把这个式子按\(t\)求和,得到
\[\begin{aligned} \nabla_{\theta} J(\theta) = \nabla_{\theta} \mathbb{E}_{\tau \sim \pi_{\theta}}[R] &= \mathbb{E}_{\tau}\left[\sum_{t^{\prime}=0}^{T-1} r_{t^{\prime}} \sum_{t=0}^{t^{\prime}} \nabla_{\theta} \log \pi_{\theta}\left(a_{t} \mid s_{t}\right)\right] \\ &= \mathbb{E}_{\tau}\left[\sum_{t=0}^{T-1} \nabla_{\theta} \log \pi_{\theta}\left(a_{t} \mid s_{t}\right) \sum_{t^{\prime}=t}^{T-1} r_{t^{\prime}}\right] \\ &= \mathbb{E}_{\tau}\left[\sum_{t=0}^{T-1} G_{t} \cdot \nabla_{\theta} \log \pi_{\theta}\left(a_{t} \mid s_{t}\right)\right] \end{aligned}\] \[\nabla_{\theta} \mathbb{E}_{\tau \sim \pi_{\theta}}[R] = \mathbb{E}_{\tau}\left[\sum_{t=0}^{T-1} G_{t} \cdot \nabla_{\theta} \log \pi_{\theta}\left(a_{t} \mid s_{t}\right)\right]\]- 其中\(G_t = \sum_{t'=t}^{T-1} r_{t'}\)是轨迹在step \(t\)时的return
- Causality:当\(t \le t'\)时,\(t'\)时刻的策略无法影响\(t\)时刻的reward
最终,我们有如下的估计更新
\[\color{green}{ \nabla_{\theta} \mathbb{E}[R] \approx \frac{1}{m} \sum_{i=1}^{m} \sum_{t=0}^{T-1} G_{t}^{(i)} \cdot \nabla_{\theta} \log \pi_{\theta}\left(a_{t}^{i} \mid s_{t}^{i}\right) }\]REINFORCE: A MC PG algorithm
该算法简单地按照策略\(\pi_{\theta}\)对多个轨迹进行采样,同时使用估计的梯度更新\(\theta\)。
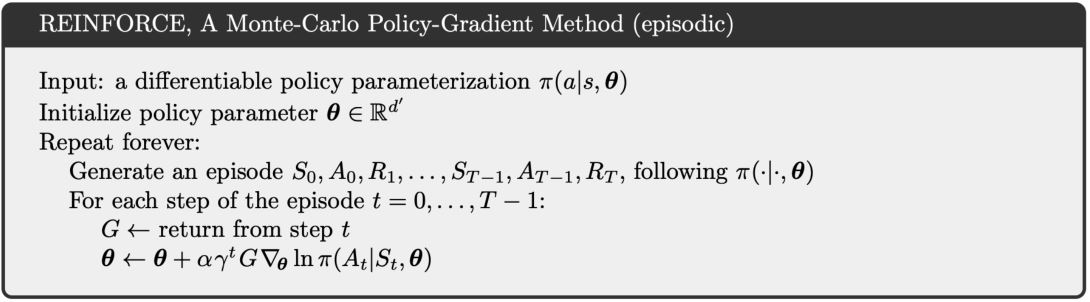
经典论文:Williams (1992). Simple statistical gradient-following algorithms for connectionist reinforcement learning: introduces REINFORCE algorithm.
5.3.3 Using baseline
原来的更新中\(G_t = \sum_{t'=t}^{T-1} r_{t'}\)是可能方差很大的轨迹的return,所以我们可以给策略梯度减去一个baseline \(b(s)\)来抑制方差
\[\nabla_{\theta} \mathbb{E}_{\tau \sim \pi_{\theta}}[R] = \mathbb{E}_{\tau} \left[\sum_{t=0}^{T-1} \color{green}{(G_{t}-b(s_t))} \color{black}{\cdot} \nabla_{\theta} \log \pi_{\theta}(a_{t} \mid s_{t})\right]\]也就是说:以与return \(G_t\)比expected return好多少成比例的方式增加动作\(a_t\)的logprob。
我们可以证明baseline \(b(s)\)是可以减少方差而不改变期望的,即\(\mathbb{E}_{\tau} \big[ \nabla_{\theta} \log \pi_{\theta}(a_{t} \vert s_{t}) b(s_t) \big] = 0\),\(\mathbb{E}_{\tau} \big[\nabla_{\theta} \log \pi_{\theta}\left(a_{t} \vert s_{t}\right)\left(G_{t}-b\left(s_{t}\right)\right) \big] = \mathbb{E}_{\tau} \big[\nabla_{\theta} \log \pi_{\theta}\left(a_{t} \vert s_{t}\right) G_{t} \big]\),\(\operatorname{Var}_{\tau} \big[\nabla_{\theta} \log \pi_{\theta}\left(a_{t} \vert s_{t}\right)\left(G_{t}-b\left(s_{t}\right)\right) \big] <\operatorname{Var}_{\tau} \big[\nabla_{\theta} \log \pi_{\theta}\left(a_{t} s_{t}\right) G_{t} \big]\)。因此,减去一个baseline在期望上是无偏的,但会减少方差。
一个好用的baseline是expected return:\(b(s_t) = \mathbb{E} [r_t + t_{t+1} + \ldots + r_{T-1}]\)。或者,我们也可以使用参数化的\(b_{\mathbf{w}}(s_t)\)
\[\nabla_{\theta} J(\theta) = \mathbb{E}_{\tau} \left[\sum_{t=0}^{T-1} \color{green}{(G_{t}-b_{\mathbf{w}}(s_t))} \color{black}{\cdot} \nabla_{\theta} \log \pi_{\theta}(a_{t} \mid s_{t})\right]\]- Baseline \(b(s)\)可以减小方差,且不会改变期望
- Baseline \(b_{\mathbf{w}}(s_t)\)的参数\(\mathbf{w}\)也需要学习,所以我们有两组参数\(\mathbf{w}\)和\(\theta\)
Vanilla PG algorithm with baseline
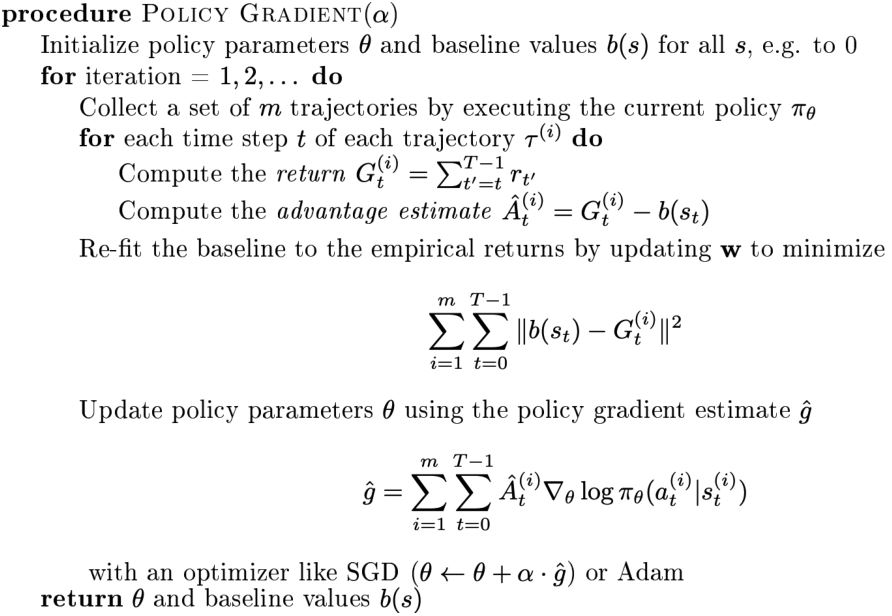
经典论文:Sutton, McAllester, Singh, Mansour (1999). Policy gradient methods for reinforcement learning with function approximation.
5.4 Actor-Critic
5.4.1 Using a Critic
更新为\(\nabla_{\theta} J(\theta) = \mathbb{E}_{\pi_{\theta}}\left[\sum_{t=0}^{T-1} G_{t} \cdot \nabla_{\theta} \log \pi_{\theta}\left(a_{t} \mid s_{t}\right)\right]\)。在实际用的时候,\(G_t\)是MC策略梯度的一个采样,它是对\(Q^{\pi_{\theta}}(s_t,a_t)\)的无偏但有噪声的估计。所以,我们可以用一个cirtic来代替它对action-value函数做估计,即
\[\color{green}{Q_{\mathbf{w}}(s,a) \approx Q^{\pi_{\theta}}(s,a)}\]这样,更新就会变成
\[\nabla_{\theta} J(\theta) = \mathbb{E}_{\pi_{\theta}}\left[ \sum_{t=0}^{T-1} \color{green}{Q_{\mathbf{w}}(s,a)} \color{black}{\cdot} \nabla_{\theta} \log \pi_{\color{green}{\theta}} \color{black}{\left(a_{t} \mid s_{t}\right)} \right]\]这样就得到了actor-critic policy gradient。
- Actor:用于生成动作的策略函数
- Critic:用于评估动作的奖励的价值函数
AC算法需要维护两组参数
- Actor:按critic建议的方向更新策略参数\(\theta\)
- Critic:更新动作-价值函数参数\(\mathbf{w}\)
5.4.2 Estimating the action-value function
Critic的作用是进行策略评估,即在当前的参数\(\theta\)下策略\(\pi_{\theta}\)有多好。策略评估是一个熟悉的问题,前面在Monte-Carlo policy evaluation、Temporal-Difference learning和Least-squares policy evaluation中都有探索过。
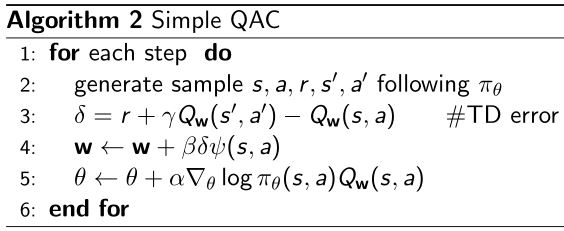
1. Action-value AC algorithm
利用一个线性值函数逼近器:\(Q_{\mathbf{w}}(s,a) = \psi(s,a)^T \mathbf{w}\)
- Critic:根据线性的TD(0)来更新\(\mathbf{w}\)
- Actor:根据策略梯度更新\(\theta\)
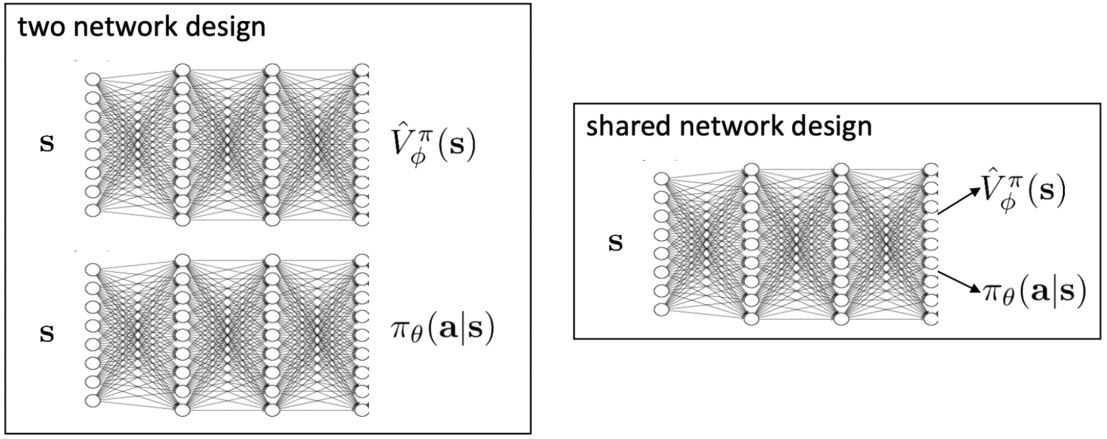
2. AC function approximators
我们可以有两个独立的函数来逼近价值函数和策略函数,或者共用网络设计(特征提取是共享的,但输出有两个),如下图所示
5.4.3 Reducing the variance of AC by a baseline
还记得Q-funtion / state-action-value function为\(Q^{\pi, \gamma}(s,a) = \mathbb{E}_{\pi}[r_1 + \gamma r_2 + \ldots \mid s_1=s, a_1=a]\)。状态价值函数\(V^{\pi, \gamma}(s) = \mathbb{E}_{\pi}[r_1 + \gamma r_2 + \ldots \mid s_1=s] = \mathbb{E}_{a \sim \pi}[Q^{\pi, \gamma}(s,a)]\)就是一个很好的baseline。所以我们引入一个advantage function(优势函数),将\(Q\)和baseline \(V\)结合起来
\[\color{green}{ A^{\pi, \gamma}(s,a) = Q^{\pi, \gamma}(s,a) - V^{\pi, \gamma}(s) }\]对应地,策略梯度变为
\[\nabla_{\theta}J(\theta) = \mathbb{E}_{\pi_{\theta}} [\nabla_{\theta} \log \pi_{\theta}(s,a) A^{\pi, \gamma}(s,a)]\]5.4.4 N-step estimators
之前我们用的是reward的MC估计,我们也可以用TD方法来进行策略梯度的更新,或者其它任何TD和MC的混合方法。
对于\(n = 1, 2, \infty\),n-step return为
\[\begin{array}{cl} n=1 \ (\text{TD}) \ \ & G_{t}^{(1)}=r_{t+1}+\gamma v\left(s_{t+1}\right) \\ n=2 \qquad \quad & G_{t}^{(2)}=r_{t+1}+\gamma r_{t+2}+\gamma^{2} v\left(s_{t+2}\right) \\ n=\infty(\text{MC}) & G_{t}^{(\infty)}=r_{t+1}+\gamma r_{t+2}+\ldots+\gamma^{T-t-1} r_{T} \end{array}\]对应的advantage estimators为
\[\begin{aligned} \hat{A}_{t}^{(1)} &= r_{t+1}+\gamma v\left(s_{t+1}\right)-v\left(s_{t}\right) \\ \hat{A}_{t}^{(2)} &= r_{t+1}+\gamma r_{t+2}+\gamma^{2} v\left(s_{t+2}\right)-v\left(s_{t}\right) \\ \hat{A}_{t}^{(\infty)} &= r_{t+1}+\gamma r_{t+2}+\ldots+\gamma^{T-t-1} r_{T}-v\left(s_{t}\right) \end{aligned}\]其中,\(\hat{A}_{t}^{(1)}\)方差低但偏差高,\(\hat{A}_{t}^{(\infty)}\)方差高但偏差低。
5.5 Overcoming Non-differentiable Computation
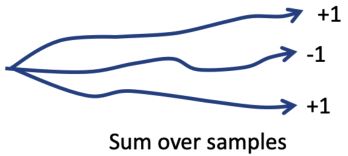
PG的另一个有趣的好处是它帮助我们克服了不可微计算。

在训练中,我们会生成很多样本(由下面的分支表示),然后我们将鼓励最终产生良好结果(在这种情况下,例如通过最后的损失来衡量)的样本。
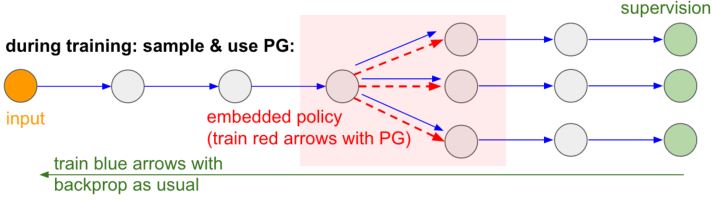
参考:Deep Reinforcement Learning: Pong from Pixels
Extention of Policy Gradient
目前最先进的强化学习方法几乎都是policy-based
- A2C和A3C:Asynchronous Methods for Deep Reinforcement Learning, ICML'16. 具有代表性的高性能AC算法: https://openai.com/blog/baselines-acktr-a2c/
- TRPO:Schulman, L., Moritz, Jordan, Abbeel (2015). Trust region policy optimization: deep RL with natural policy gradient and adaptive step size
- PPO:Schulman, Wolski, Dhariwal, Radford, Klimov (2017). Proximal policy optimization algorithms: deep RL with importance sampled policy gradient
Different schools of RL
- Value-based RL: 通过动态规划来解决RL
- 传统的强化学习和控制理论
- 代表性的算法:Deep Q-learning和它的变体
- 代表性的学者:Richard Sutton, David Silver, from DeepMind
- Policy-based RL: 主要通过学习来解决RL
- 机器学习和深度学习
- 代表性的算法:PG和它的变体TRPO, PPO和其它的一些算法
- 代表性的学者:Pieter Abbeel, Sergey Levine, John Schulman, from OpenAI, Berkelely
详见周老师在知乎的回答:请问DeepMind和OpenAI身后两大RL流派有什么具体的区别?
