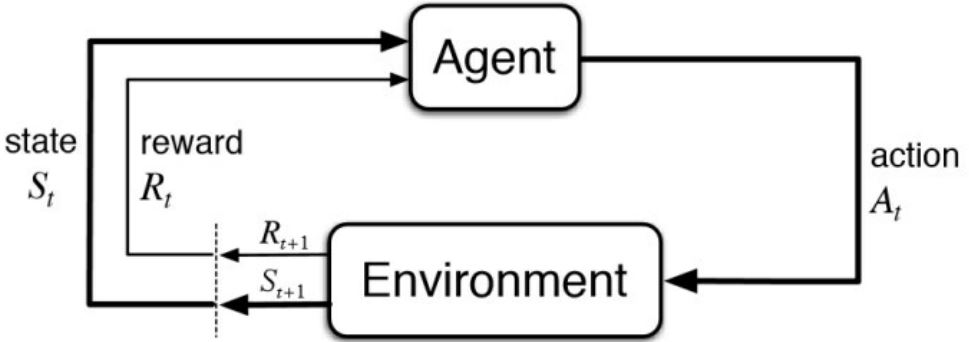
Markov Decision Process (MDP)
请先阅读书本的Chapter 1、3、4
MDP框架是非常灵活的,能够以很多不同的方式应用到很多不同的问题上。比如,其时间步长可以是决策和行为的任意连续随机事件。行为可以是低阶的控制,也可以是高阶的决策。状态也有很多不同的形式,可以完全由低阶的感觉决定,也可以是高解和抽象的。一般来说,行为可以是我们想要学习如何做出的任何决定,而状态可以是我们知道的任何可能对做出这些决定有用的东西。
需要特别指出的是,agent和环境之间的边界通常与机器人或动物身体的物理边界不同。如果我们将MDP框架应用于人或动物,肌肉、骨骼和感觉器官应该被视为环境的一部分。奖励也可能是在自然和人工学习系统的物理体内计算的,但被认为是在agent外部的。agent-环境的边界代表agent的absolute control的限制,而不是其知识的限制。
马尔科夫决策过程可以模拟许多现实世界的问题,它正式描述了强化学习的框架。
在MDP下,环境是完全可观的。
- 最优控制主要处理连续的MDP
- 部分可观问题可以转化为MDP
Markov Property:
1. 历史状态 \(h_t = \{ s_1, s_2, \ldots, s_t \}\)
2. 状态\(s_t\)是马尔可夫的,当且仅当
\(p(s_{t+1} \vert s_t) = p(s_{t+1} \vert h_t) \tag{1}\) \(p(s_{t+1} \vert s_t, a_t) = p(s_{t+1} \vert h_t, a_t) \tag{2}\)
3. "The future is independent of the past given the present."
Markov Property对状态做出了限制,state必须包含之前的agent-environment的交互所有方面的信息,这些信息会对未来产生影响。
2.1 Markov Processes/ Chain
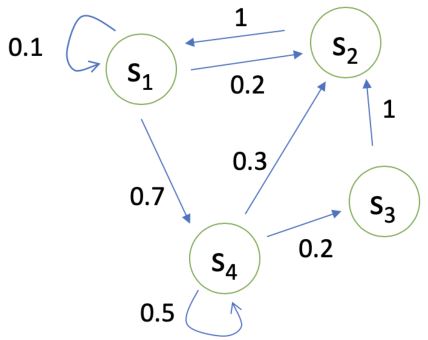
状态转移矩阵\(P\)指定了\(p(s_{t+1} = s' \vert s_t = s)\)
\[P = \begin{bmatrix} P(s_1 \vert s_1) & P(s_2 \vert s_1) & \cdots & P(s_N \vert s_1) \\ P(s_1 \vert s_2) & P(s_2 \vert s_2) & \cdots & P(s_N \vert s_2) \\ \vdots & \vdots & \ddots & \vdots \\ P(s_1 \vert s_N) & P(s_2 \vert s_N) & \cdots & P(s_N \vert s_N) \end{bmatrix}\]2.2 Markov Reward Processes (MRPs)
马尔可夫奖励过程为 马尔可夫链 + 奖励
Markov Reward Processes:
1. \(S\)是状态(\(s \in S\))的(有限)集合
2. \(P\)是指定\(p(s_{t+1} = s' \vert s_t = s)\)的动力学/过渡模型
3. \(R\)是reward function \(R(s_t = s) = \mathbb{E}[r_t \vert s_t = s]\)
4. Discount factor \(\gamma \in [0,1]\)
如果状态数有限,\(R\)可以是一个向量。
2.2.1 Return and Value function
Horizon:
- 每集的最大时间步数 2
- 可以是无限的,否则称为有限马尔可夫(奖励)过程
Return:
- 时间步数\(t\)到horizon的奖励的折扣总和 \(\color{green}{G_t = R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3} + \cdots + \gamma^{T-t-1} R_{T}}\)
尽管return是无数个项之和,如果奖励是非零且恒定的并且折扣因子小于1时,return仍然是有限的。
MRP的状态价值函数 \(V_t(s) = \mathbb{E}[G_t \vert s_t = s] = \mathbb{E}[R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3} + \cdots + \gamma^{T-t-1} R_{T}\vert s_t = s]\)
- 时刻\(t\)状态\(s\)下的return期望值
- 未来奖励的当前价值
2.2.2 Why Discount Factor?
- 避免循环马尔可夫过程中的无限回报
- 未来的不确定性可能无法充分体现
- 如果奖励是有实际价值的,即时奖励可能比延迟奖励更有吸引力
- 动物/人类的行为表现出对即时奖励的偏好
- 有时可以使用没有折扣的马尔可夫奖励过程(即\(\gamma=1\)),e.g. 如果所有序列终止。
\(\gamma = 0\):只关心即时奖励
\(\gamma = 1\):延迟奖励等于即时奖励
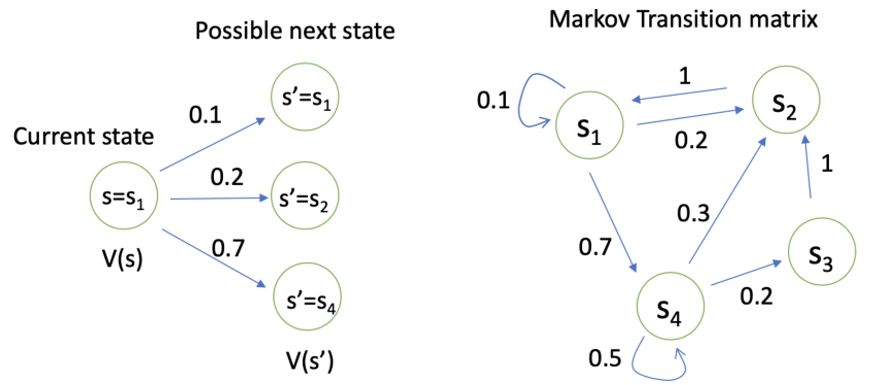
2.2.3 MRP价值函数的计算
价值函数:从状态\(s\)开始的期望return
\[V(s) = \mathbb{E}[G_t \vert s_t = s] = \mathbb{E}[ R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3} + \cdots \vert s_t = s]\]MRP价值函数满足如下的Bellman equation:
\[\color{green}{V(s) = R(s) + \gamma \sum_{s' \in S}{P(s' \vert s) V(s')}}\]其中,\(R(s)\)为即时奖励,\(\gamma \sum_{s' \in S}{P(s' \vert s) V(s')}\)为延迟奖励的折扣总和。
Bellman equation描述了状态间的迭代关系。
当前状态价值函数 = 即时奖励 + 下一步每个状态的价值函数×转移概率累计求和之后×折扣因子
因此,我们可以把\(V(s)\)写成矩阵形式。
\[\begin{bmatrix} V(s_1) \\ V(s_2) \\ \vdots \\ V(s_N) \end{bmatrix} = \begin{bmatrix} R(s_1) \\ R(s_2) \\ \vdots \\ R(s_N) \end{bmatrix} + \gamma \begin{bmatrix} P(s_1 \vert s_1) & P(s_2 \vert s_1) & \cdots & P(s_N \vert s_1) \\ P(s_1 \vert s_2) & P(s_2 \vert s_2) & \cdots & P(s_N \vert s_2) \\ \vdots & \vdots & \ddots & \vdots \\ P(s_1 \vert s_N) & P(s_2 \vert s_N) & \cdots & P(s_N \vert s_N) \end{bmatrix} \begin{bmatrix} V(s_1) \\ V(s_2) \\ \vdots \\ V(s_N) \end{bmatrix}\] \[V = R + \gamma P V\]MRP的解析解为\(V = (I - \gamma P)^{-1} R\)
- 对于\(N\)中状态,矩阵求逆的复杂度为\(O(N^3)\)
- 此方法只能解决小型的MRPs
2.2.4 MRP值的迭代算法
1. 动态规划
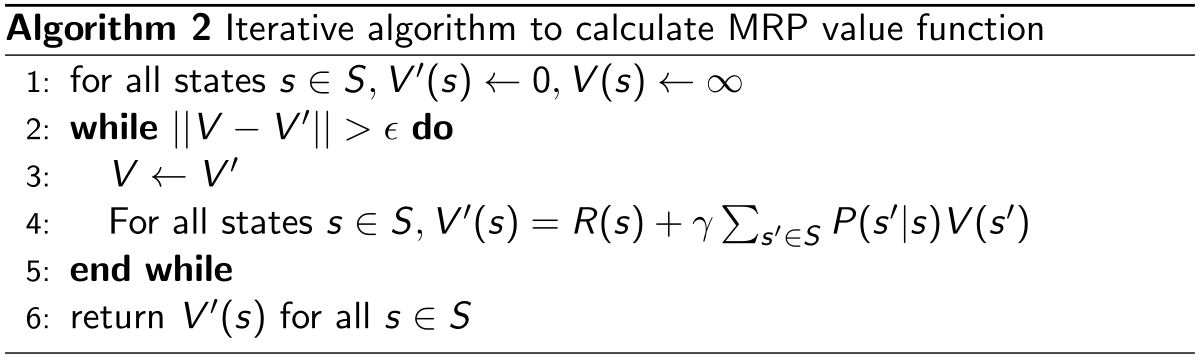
2. Monte-Carlo evaluation
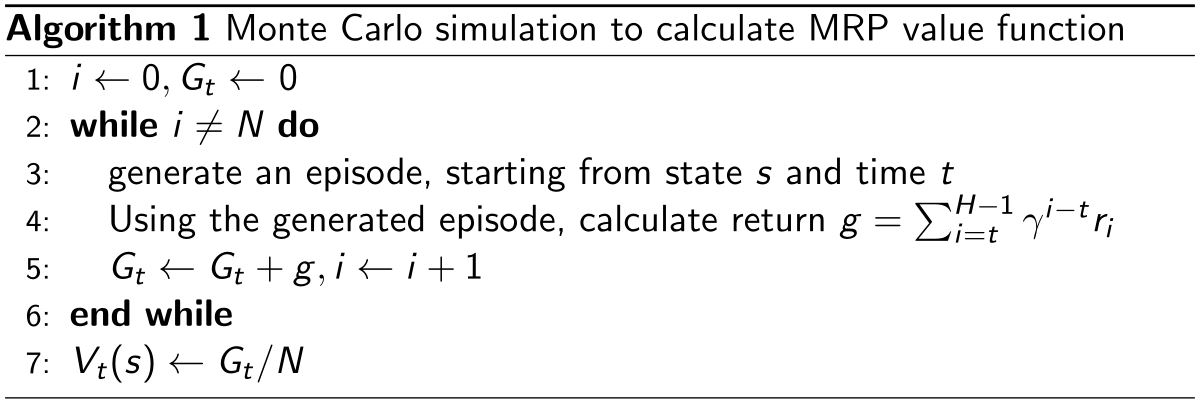
3. Temporal-Difference learning(前两个方法的结合)
2.3 Markov Decision Processes (MDPs)
马尔可夫决策过程为 马尔可夫奖励过程 + 决策
Markov Decision Processes:
1. \(S\)是状态(\(s \in S\))的(有限)结合
2. \(\color{green}{A}\)是行为的有限集合
3. \(p^a\)是各个行为对应的动力学/过渡模型 \(p(S_{t+1} = s' \vert S_t = s ,\ \color{green}{A_t = a})\)
4. \(r\)是期望的reward function \(r(S_t = s ,\ A_t = a) = \mathbb{E}[R_t \vert S_{t-1} = s ,\ \color{green}{A_{t-1} = a}]\)
5. Discount factor \(\gamma \in [0,1]\)
MDP是一个元组:\((S ,\ A ,\ P ,\ R ,\ \gamma)\)
2.3.1 Policy in MDP
- 策略指定在每个状态下要采取的行动
- 给定一个状态,指定行为的分布情况
- 策略:\(\pi (a \vert s) = P(A_t =a \vert S_t = s)\)
- 策略是静止的(时间独立的),对于任意的\(t \gt 0\),\(A_t \text{~} \pi (a \vert s)\)
给定一个MDP \((S ,\ A ,\ P ,\ R ,\ \gamma)\)和一个策略\(\pi\),状态序列\(S_1, S_2, \ldots\)为马尔可夫过程\((S, P^{\pi})\),状态和奖励序列\(S_1, R_1, S_2, R_2 \ldots\)为马尔可夫奖励过程\((S, P^{\pi}, R^{\pi}, \gamma)\),其中
\[\begin{aligned} P^{\pi}(s' \vert s) &= \sum_{a \in A} \pi(a \vert s) P(s' \vert s, a) \\ R^{\pi}(s) &= \sum_{a \in A} \pi(a \vert s) R(s, a) \end{aligned}\]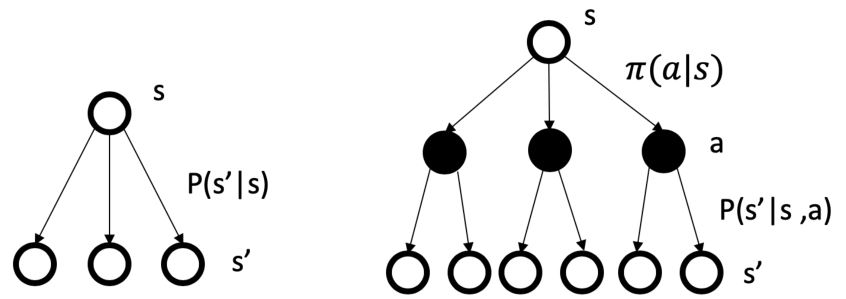
上图中,左边是MP/MRP的状态转移过程,右边是MDP的状态转移过程,可以看出MDP多了行为决策的过程。
强化学习方法指定agent的策略是根据其经验而改变的。
2.3.2 Value function for MDP
几乎所有强化学习算法都涉及估计价值函数——状态函数(或状态-动作),估计agent处于给定状态有多好(或在给定状态下执行给定动作有多好)。这里的"有多好"的概念是根据可以预期的future rewards来定义的,或者更准确地说,是根据expected return来定义的。当然,agent可以期望在未来获得的奖励取决于它将采取什么行动。因此,价值函数是针对特定的行为方式定义的,称为策略。
MDP的状态价值函数\(v^{\pi}(s)\)(the state-value function for policy \(\pi\))是从状态\(s\)出发,遵循策略\(\pi\)的期望return
\[v^{\pi}(s) = \mathbb{E}_{\pi}[G_t \vert S_t=s] \tag{3}\]行为价值函数\(q^{\pi}(s, a)\)(the action-value function for policy \(\pi\))是从状态\(s\)出发,采取行为\(a\),遵循策略\(\pi\)的期望return
\[q^{\pi}(s, a) = \mathbb{E}_{\pi}[G_t \vert S_t=s, A_t=a] \tag{4}\]\(v^{\pi}(s)\)与\(q^{\pi}(s, a)\)的关系为
\[v^{\pi}(s) = \sum_{a \in A} \pi(a \vert s) q^{\pi}(s, a) \tag{5}\]2.3.3 Bellman Expectation Equation
状态价值函数的Bellman方程描述了状态的价值和它后续状态的价值之间的关系,它指出开始状态的值必须等于下一个状态的期望(折扣)值加上此情况下的期望奖励。
状态价值函数可以分解为即时奖励加上后续状态的折扣值
\[v^{\pi}(s) = \mathbb{E}_{\pi} [R_{t+1} + \gamma v^{\pi}(S_{t+1}) \vert S_t = s] \tag{6}\]行为价值函数也可以类似地分解
\[q^{\pi}(s, a) = \mathbb{E}_{\pi} [ R_{t+1} + \gamma q^{\pi}(S_{t+1}, A_{t+1}) \vert S_t = s, A_t = a ] \tag{7}\]根据
\[v^{\pi}(s) = \sum_{a \in A} \pi (a \vert s) q^{\pi}(s, a) \tag{8}\] \[q^{\pi}(s, a) = R_s^a + \gamma \sum_{s' \in S} P(s' \vert s,a) v^{\pi}(s') \tag{9}\]因此
\[v^{\pi}(s) = \sum_{a \in A} \pi(a \vert s) \bigg[R(s,a) + \gamma \sum_{s' \in S} P(s' \vert s,a) v^{\pi}(s')\bigg] \tag{10}\] \[q^{\pi}(s,a) = R(s,a) + \gamma \sum_{s' \in S} P(s' \vert s,a) \sum_{a' \in A} \pi (a' \vert s') q^{\pi}(s', a') \tag{11}\]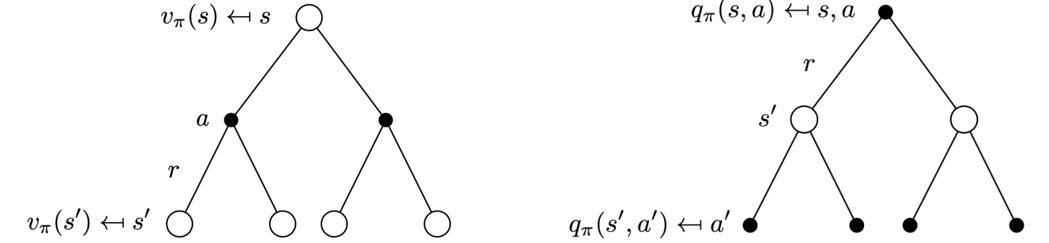
\(v^{\pi}(s)\)也可以写作
\[\begin{aligned} v^{\pi}(s) = & \mathbb{E}_{\pi} [G_t \vert S_t = s] \\ = & \mathbb{E}_{\pi} [R_{t+1} + \gamma G_{t+1} \vert S_t = s] \\ = & \sum_{a \in A} \pi(a \vert s) \sum_{s'} \sum_r p(s', r \vert s, a) \big[r + \gamma \mathbb{E}_{\pi} [G_{t+1} \vert S_{t+1} = s']\big] \\ = & \sum_{a \in A} \pi(a \vert s) \sum_{s', r} p(s', r \vert s, a) \big[r + \gamma v_{\pi}(s')\big] \qquad \text{for all } s \in S \end{aligned}\]其中,\(r\)即为\(R(s,a)\),此方程即为一致性条件。
价值函数的一个基本性质是它们满足类似于之前为return建立的递归关系,这个性质贯穿于强化学习和动态规划中。
(补充:Bellman方程的数学证明)
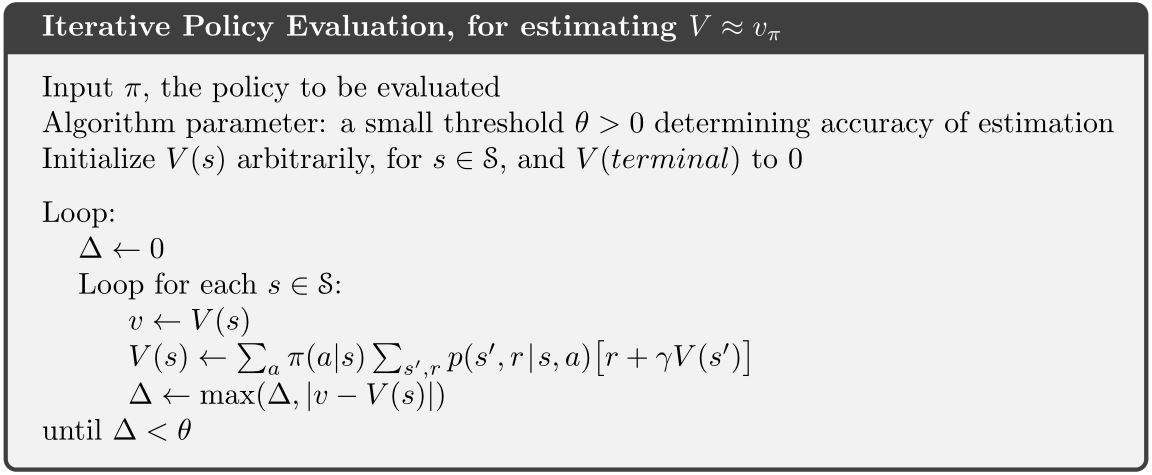
2.3.4 Policy Evaluation (Prediction)
评估给定策略\(\pi\)下的状态值:计算\(v^{\pi}(s)\),也称 (value) prediction。
2.4 Decision Making in MDP
Prediction(评估给定的策略):
- 输入:马尔可夫决策过程\(<S ,\ A ,\ P ,\ R ,\ \gamma>\)和策略\(\pi\)或者马尔可夫奖励过程\(<S ,\ P^{\pi} ,\ R^{\pi} ,\ \gamma>\)
- 输出:价值函数\(v^{\pi}\)
Control(搜索最优策略):
- 输入:马尔可夫决策过程\(<S ,\ A ,\ P ,\ R ,\ \gamma>\)
- 输出:最优价值函数\(v^*\)和最优策略\(\pi^*\)
马尔可夫决策过程中的预测和控制可以用动态规划来求解,因为贝尔曼期望方程是一个不动点方程,根据不动点定理可知,价值函数经迭代后会收敛到\(v^{\pi}\)。
线性规划方法也可用于求解MDP,在某些情况下,其最坏情况下的收敛保证优于DP方法。但是,与DP方法相比,线性规划方法只能解决状态较少的问题。对于大规模的问题,只有DP方法是可行的。DP有时被认为适用性有限,因为维度灾难的存在,即状态的数量通常与状态变量的数量成指数增长。大型状态集确实会带来困难,但这些是问题固有的困难,而不是DP作为解决方法的困难。事实上,与直接搜索和线性规划等competing methods相比,DP更适合处理大型状态空间。
2.4.1 Policy evaluation on MDP
-
目标:评估给定策略\(\pi\)
-
输出:该策略下的价值函数\(v^{\pi}\)
-
解决:迭代回溯Bellman expectation
\[v_{t+1}(s) = \sum_{a \in A} \pi(a \vert s) \bigg[R(s,a) + \gamma \sum_{s' \in S} P(s' \vert s,a) v_t(s')\bigg] \tag{14}\]
在每次迭代\(t+1\),对于所有的状态\(s \in S\)更新从\(v_t(s')\)到\(v_{t+1}(s)\),其中\(s'\)是\(s\)的下一状态。 -
收敛:\(v_1 \rightarrow v_2 \rightarrow \cdots \rightarrow v_{\pi}\)
特定策略的Bellman expectation回溯
可以按式(14)迭代或者以MRP \(<S ,\ P^{\pi} ,\ R^{\pi} ,\ \gamma>\)的形式
\(v_{t+1}(s) = R^{\pi}(s) + \gamma P^{\pi}(s' \vert s) v_t(s') \tag{16}\)
例:GridWorld: Dynamic Programming Demo
最优价值函数
最优的状态价值函数\(v^*(s)\)是所有策略下的最大价值函数\(v^*(s) = \max_{\pi} v^{\pi}(s)\)。最优策略为\(\pi^*(s) = \text{arg max}_{\pi} v^{\pi}(s)\)。如果知道了最优值,那么这个MDP就被解决了。虽然最优价值函数是唯一的,但可能会有多个最优策略(比如两个具有相同最优价值函数的动作)。
以表示状态-动作对函数(而不仅仅是状态)为代价,最优动作值函数允许选择最优动作,而不必知道任何可能的后续状态及其值,也就是说,不必知道任何环境动态。
寻找最优策略
Policy improvement:通过使其对原策略的价值函数贪心,从而改进原政策、制定新政策的过程。
通过最大化\(q^*(s,a)\)可以得到最优策略
\[\pi^*(a \vert s) = \begin{cases} 1 \quad ,\ \text{if } a = \text{arg max}_{a \in A} q^*(s,a) \\ 0 \quad ,\ \text{otherwise} \end{cases}\]- 任何MDP都有一个确定的最优策略
- 如果\(q^*(s,a)\)已知,那么就可以立即得到最优策略
寻找最优策略的一种方法是枚举,确定的策略总数为\(\vert A \vert^{\vert S \vert}\)。其它方法比如policy iteration和value iteration会效率高很多。
2.4.2 MDP control
MDP的控制即为搜索最优策略的过程
\[\pi^*(s) = \text{arg max}_{\pi} v^{\pi}(s) \tag{18}\]MDP的最优策略是一个infinite horizon问题(agent永远会行动),它是
- Deterministic
- Stationary(与时间步长无关)
- Unique? 不一定,可能有具有相同最优值的状态动作
Policy iteration
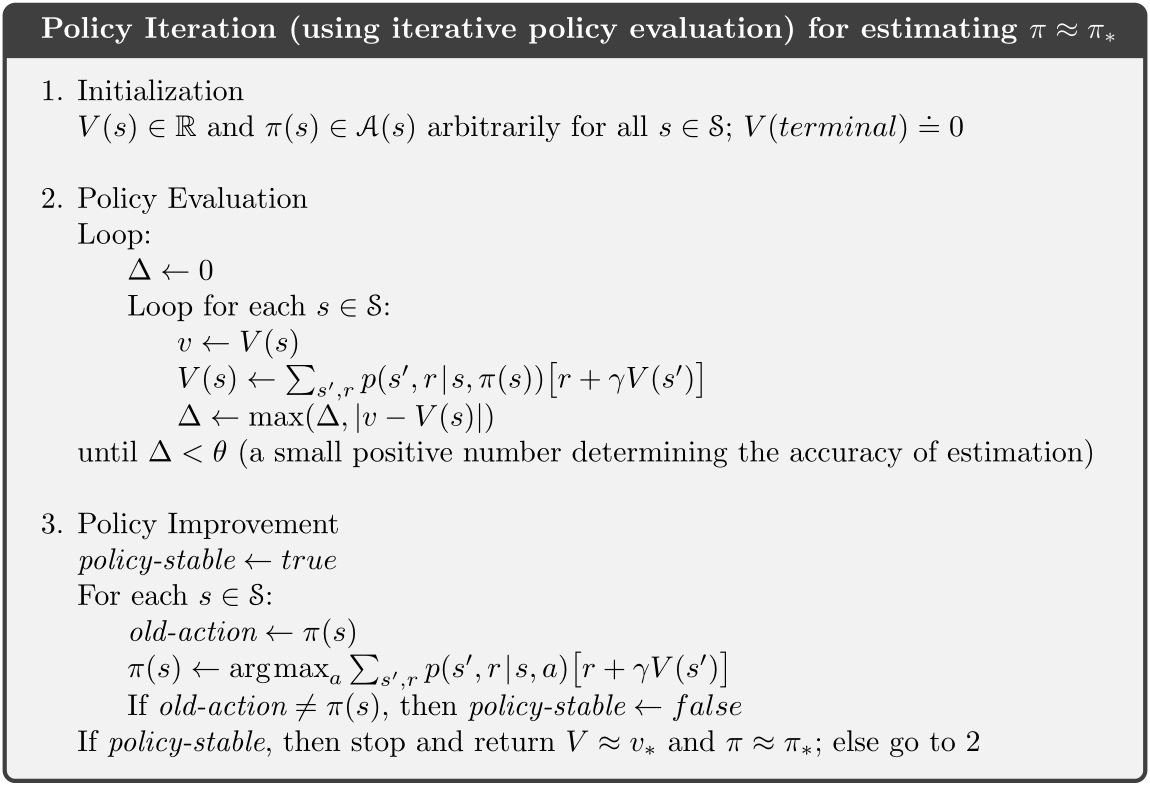
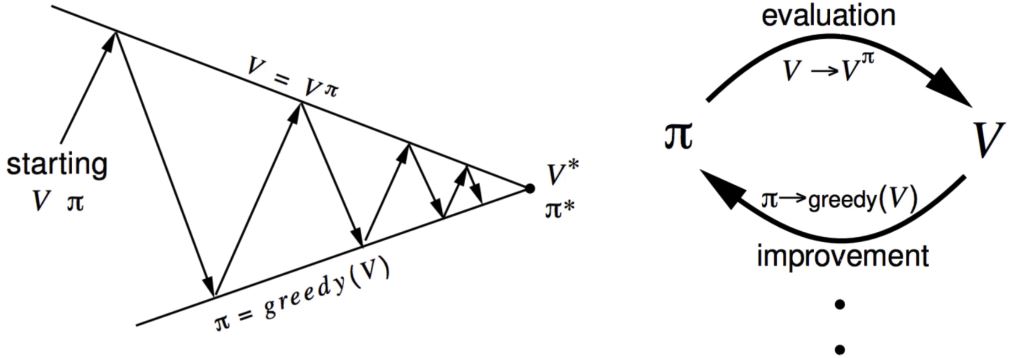
迭代以下两步:
- 策略评估(给定当前的\(\pi\),计算\(v\))
- 策略改进(通过对\(v^{\pi}\)采取贪心行为 \(\pi' = \text{greedy}(v^{\pi})\))
如何改进策略?
- 计算策略\(\pi\)下的state-action值:\(q^{\pi}(s,a) = R(s,a) + \gamma \sum_{s' \in S} P(s' \vert s,a) v^{\pi_i}(s')\)
- 对于所有的\(s \in S\)计算新的策略:\(\pi_{i+1}(s) = \text{arg max}_a q^{\pi_i}(s,a)\)
策略的改进过程具有单调性,所以当改进停止时,\(q^{\pi}(s, \pi'(s)) = \max_{a \in A} q^{\pi}(s, a) = q^{\pi}(s, \pi(s)) = v^{\pi}(s)\)。因此满足Bellman optimality equation
\[v^{\pi}(s) = \max_{a \in A} q^{\pi}(s, a)\]因此,对于所有的\(s \in S\)都有\(v^{\pi}(s) = v^*(s)\),所以\(\pi\)是一个最优策略。
最优值函数由贝尔曼最优方程达到
\[\begin{aligned} v^{\pi}(s) &= \max_{a} q^{\pi}(s, a) \\ q^{\pi}(s, \pi'(s)) &= R(s,a) + \gamma \sum_{s' \in S} P(s' \vert s, a) v^*(s') \end{aligned}\]因此,
\[\begin{aligned} v^{\pi}(s) &= \max_a R(s,a) + \gamma \sum_{s' \in S} P(s' \vert s, a) v^*(s') \\ q^{\pi}(s, \pi'(s)) &= R(s,a) + \gamma \sum_{s' \in S} P(s' \vert s, a) \max_{a'} q^{\pi}(s', a') \end{aligned}\]Policy iteration的缺点:每次迭代都需要进行策略评估,这可能是一个漫长的迭代过程,需要多次扫描状态集。事实上,策略迭代的策略评估步骤可以通过多种方式暂停,而不会影响策略迭代收敛的必然性。
Value iteration
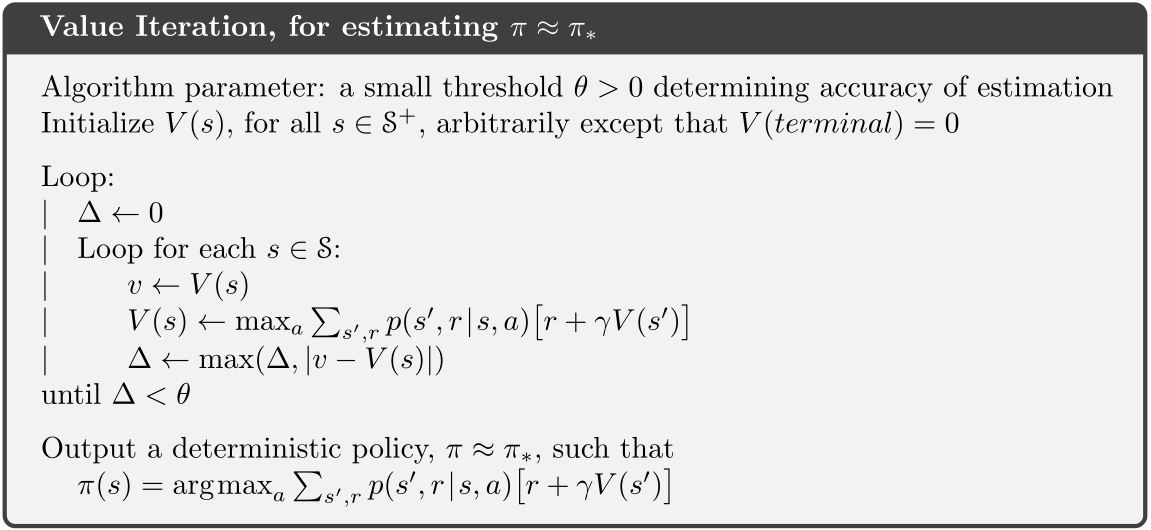
Value iteration是把Bellman optimality equation作为规则来迭代的。如果已知子问题的最优解\(v^*(s')\),那么按以下贝尔曼最优方程规则迭代,就可以得到最优解\(v^*(s)\)
\[v(s) \leftarrow \max_{a \in A} \left( R(s,a) + \gamma \sum_{s' \in S} P(s' \vert s, a) v(s') \right)\]-
目标:找到最优策略\(\pi\)
-
解决:迭代贝尔曼最优方程
-
Value iteration algorithm:
初始化 \(k = 1\)且对于所有状态\(s\)有\(v_0(s) = 0\)
for \(k = 1 : H\)
对于每个状态\(s\)
\(\begin{aligned} q_{k+1}(s, a) &= R(s,a) + \gamma \sum_{s' \in S} P(s' \vert s, a) v_k(s') \\ v_{k+1}(s) &= \max_{a} q_{k+1}(s, a)\end{aligned}\)
\(k \leftarrow k+1\)
在值迭代后检索最优策略
\(\pi(s) = \text{arg max}\left(R(s,a) + \gamma \sum_{s' \in S} P(s' \vert s, a) v_{k+1}(s')\right)\)
例:GridWorld: Dynamic Programming Demo
Policy iteration and value iteration on FrozenLake
二者区别
- Policy iteration包含:policy iteration + policy improvement,两者反复迭代直到策略收敛。
- Value iteration包含:寻找最优价值函数 + 一次策略选取。两者没有重复,因为一旦价值函数是最优的,那么它的策略也应该是最优的(即收敛的)。
- 寻找最优价值函数也可以看作是策略改进(因为取max)和截断策略评估(无论收敛如何,只扫描所有状态后重新分配\(v(s)\))的组合。
2.4.3 总结
| 问题 | Bellman Equation | Algorithm |
|---|---|---|
| Prediction | Bellman Expectation Equation | Iterative Policy Evaluation |
| Control | Bellman Expectation Equation | Policy Iteration |
| Control | Bellman Optimality Equation | Value Iteration |
强化学习的在线性质使我们有可能花更多精力学习如何近似最优策略,以便为经常遇到的状态做出正确的决策,而为不经常遇到的状态付出更少的精力。这是强化学习区别于其他近似求解MDP方法的一个关键特性。
