Introduction of RL
1.1 Policy-based Approach
(learning an actor)

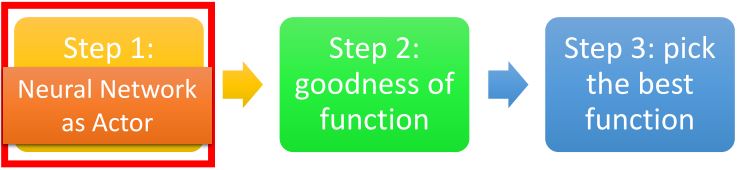
1.1.1 Neural network as actor
- 神经网络输入:机器所观察到的内容,表示成一个向量或矩阵
- 神经网络输出:每个动作对应于输出层的一个神经元
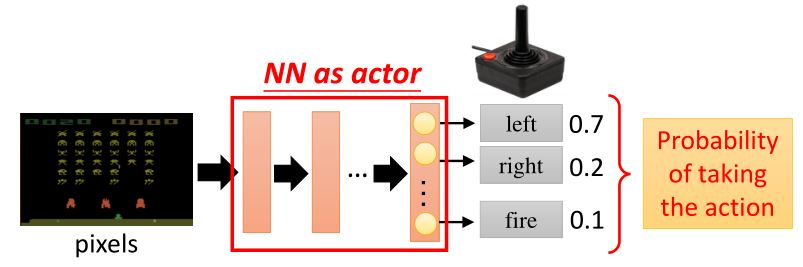
问:用神经网络代替查找表的好处?
Generalization
1.1.2 Goodness of actor

给定一个网络参数为\(\theta\)的actor \(\pi_{\theta} (s)\),用actor \(\pi_{\theta} (s)\)来玩游戏。我们的目标是最大化total reward:\(R_{\theta} = \sum_{t=1}^T r_t\)。哪怕是同一个actor,每次的\(R_{\theta}\)也是不同的。因为actor采用随机性策略,所以actor本身和游戏都是存在随机性的。
定义\(\color{green}{\bar{R_{\theta}}}\)为\(\color{green}{R_{\theta}}\)的期望值。\(\bar{R_{\theta}}\)可以评估actor \(\pi_{\theta} (s)\)的好坏。
一个episode可以被看作一个轨迹\(\tau\),\(\tau = \{ s_1, a_1, r_1, s_2, a_2, r_2, \cdots, s_T, a_T, r_T \}\),\(R_{\tau} = \sum_{n=1}^T r_n\)。如果用actor来玩游戏,每个\(\tau\)都有可能被采样到,其概率\(P(\tau \vert \theta)\)取绝于参数\(\theta\)。
\[\bar{R_{\theta}} = \sum_{\tau} R(\tau) P(\tau \vert \theta) \approx \frac{1}{N} \sum_{n=1}^N R(\tau^n)\]要求\(R_{\theta}\)的期望,需要对所以可能的轨迹求和。可以按策略\(\pi_{\theta}\)来玩\(N\)次游戏,得到\(\tau^1, \tau^2, \cdots, \tau^N\),即从\(P(\tau \vert \theta)\)中进行\(N\)次采样。
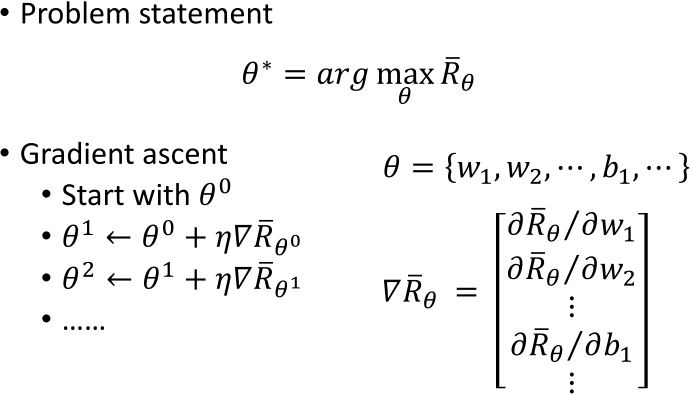
1.1.3 Pick the best function

Gradient ascent
Policy gradient
已知\(\bar{R_{\theta}} = \sum_{\tau} R(\tau) P(\tau \vert \theta)\),其梯度为\(\nabla \bar{R_{\theta}} = \sum_{\tau} R(\tau) \nabla P(\tau \vert \theta)\)。因此\(R(\tau)\)无需是可微的,可以是一个黑箱(因为reward是由环境给出的)。
利用\(\frac{d \log(f(x))}{dx} = \frac{1}{f(x)} \frac{d f(x)}{dx}\),可以进一步得到
\[\begin{aligned} \nabla \bar{R_{\theta}} = \sum_{\tau} R(\tau) P(\tau \vert \theta) \frac{\nabla P(\tau \vert \theta)}{P(\tau \vert \theta)} =& \sum_{\tau} R(\tau) P(\tau \vert \theta) \nabla \log P(\tau \vert \theta) \\ \approx& \frac{1}{N} \sum_{n=1}^N R(\tau^n) \nabla \log P(\tau^n \vert \theta) \end{aligned}\]轨迹\(\tau=\{ s_{1}, a_{1}, r_{1}, s_{2}, a_{2}, r_{2}, \cdots, s_{T}, a_{T}, r_{T} \}\),所以
\[\begin{aligned} P(\tau \mid \theta) &= p\left(s_{1}\right) \prod_{t=1}^{T} p\left(a_{t} \mid s_{t}, \theta\right) p\left(r_{t}, s_{t+1} \mid s_{t}, a_{t}\right) \\ \log P(\tau \mid \theta) &= \log p\left(s_{1}\right) + \sum_{t=1}^{T} \log p\left(a_{t} \mid s_{t}, \theta\right)+\log p\left(r_{t}, s_{t+1} \mid s_{t}, a_{t}\right) \end{aligned}\] \[\boxed{ \nabla \log P(\tau \vert \theta) = \sum_{t=1}^{T} \log p\left(a_{t} \mid s_{t}, \theta\right) }\]到这一步,我们已经略去了和\(\theta\)无关的项。
梯度上升,\(\theta^{new} \leftarrow \theta^{old} + \eta \nabla \bar{R}_{\theta^{old}}\)
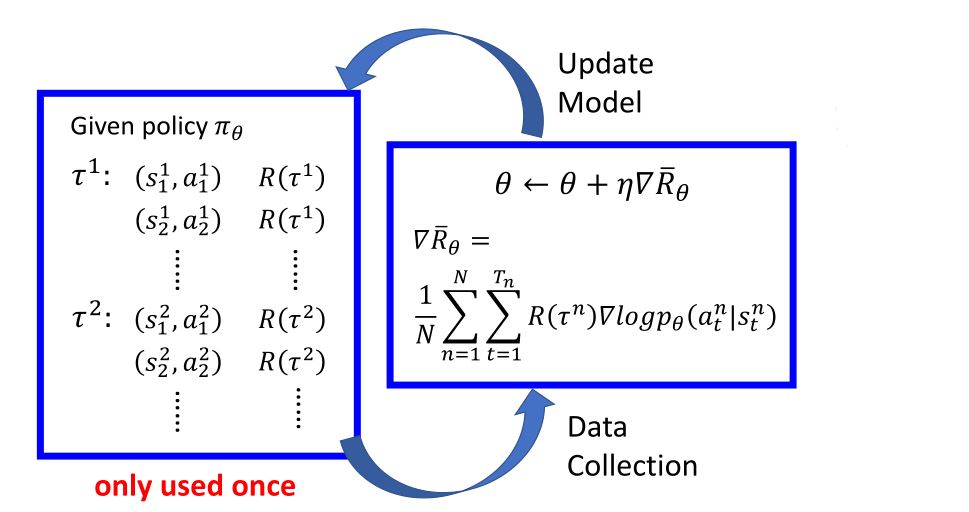
\[\begin{aligned} \nabla \bar{R_{\theta}} \approx \frac{1}{N} \sum_{n=1}^N R(\tau^n) \nabla \log P(\tau^n \vert \theta) =& \frac{1}{N} \sum_{n=1}^N R(\tau^n) \sum_{t=1}^{T_n} \nabla \log p(a_{t}^n \mid s_{t}^n, \theta) \\ =& \frac{1}{N} \sum_{n=1}^N \sum_{t=1}^{T_n} R(\tau^n) \nabla \log p(a_{t}^n \mid s_{t}^n, \theta) \end{aligned}\]
这里很重要的一点是,考虑整个轨迹的奖励之和而不是一次即时的奖励。因为强化学习的特性 reward delay。
Add a baseline
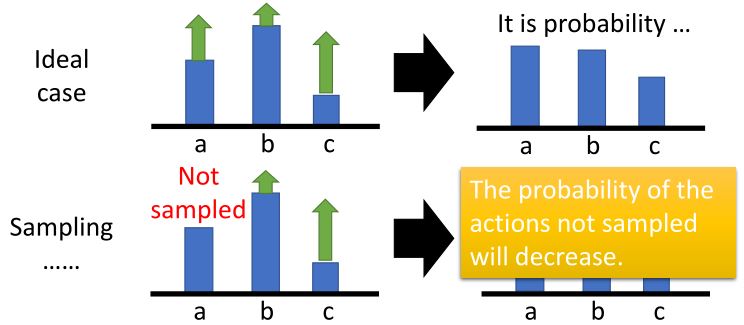
在采样过程中,可能会漏掉某个动作,尽管它的奖励很高,但它的的概率会降低。可能存在\(R(\tau^n)\)一直为正的情况,需要减去一个bias。
\[\begin{aligned} &\theta^{new} \leftarrow \theta^{old} + \eta \nabla \bar{R}_{\theta^{old}} \\ &\nabla \bar{R_{\theta}} \approx \frac{1}{N} \sum_{n=1}^N \sum_{t=1}^{T_n} \big(R(\tau^n) - b\big) \nabla \log p(a_{t}^n \mid s_{t}^n, \theta) \end{aligned}\]1.2 Value-based Approach
(learning a critic)
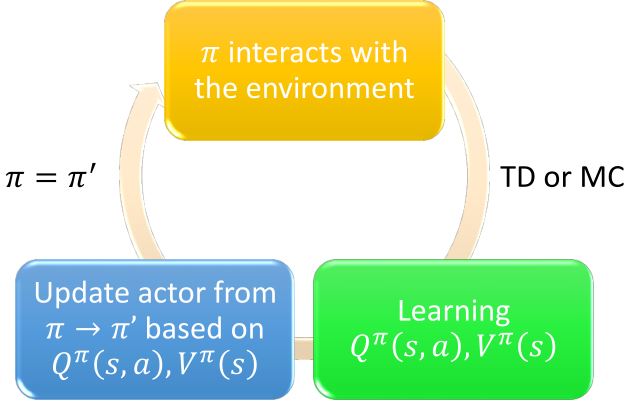
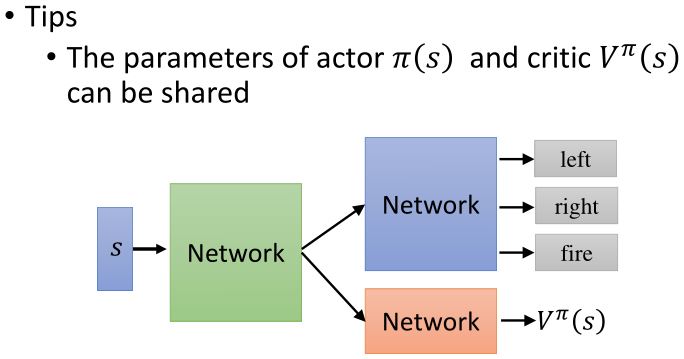
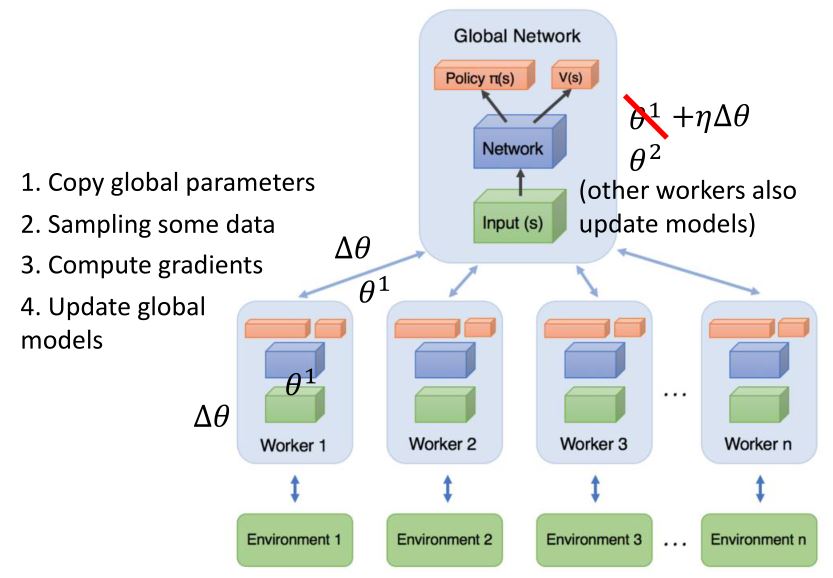
1.3 DRL: Actor-Critic